13.07.2013 испытал 3.0.1 по сравнению с 2.9.1b. PID не трогал, все на стоке.
До перепрошивки изменил плату питания. Была хоббикинговская с круговыми проводниками, а сделал квадрат с двустороннего текстолита размером примерно 30*2,5мм. Один слой — минус, второй слой вокруг буквой П минус, спаеный со вторым слоем, внутри плюс и побольше припоя, чтобы усилить проводник.
Прошил APM2.5. Откалибровал пульт, аксель, компас.
Включил compassmot. Показал результат 11%.
Попытался взлететь. Разницу уже заметил. Управление стало острее штоль.
Дальнейшие испытания в поле. На газ реагирует немного плавнее, при включении лоитера и альтхолда и разворотах по Yaw просадок не заметил. Лоитер наверно получше держит, радиус меньше метра. Ветра не было. Полетал в стабе, разницы не заметил. Включил лоитер, так что-то уж больно урезали скорость в лоитере. Параметр стоял 500 (мм/с???), поставил 1000, но испытать забыл.
Дальше запустил RTL.
При посадке и подлете к точке немного задумывался типа «А что дальше делать?». На 2.9.1b на высоте около 2х и радиусе 2х метров пытался все-таки приблизиться к точке, а на 3.0.1 садится как бы проще без попыток скорректировать. Дальше 2х метров не садился. Первый раз не задерживался на 2х метрах высоты, второй раз задержался и сел, третий раз встал на 2х метрах и не стал садиться. Стал смотреть параметры. 2 метра в настройках стояло и изменил на ноль. После этого стал садиться нормально.
Только еще добавить взлет, посадку и изменение высот.
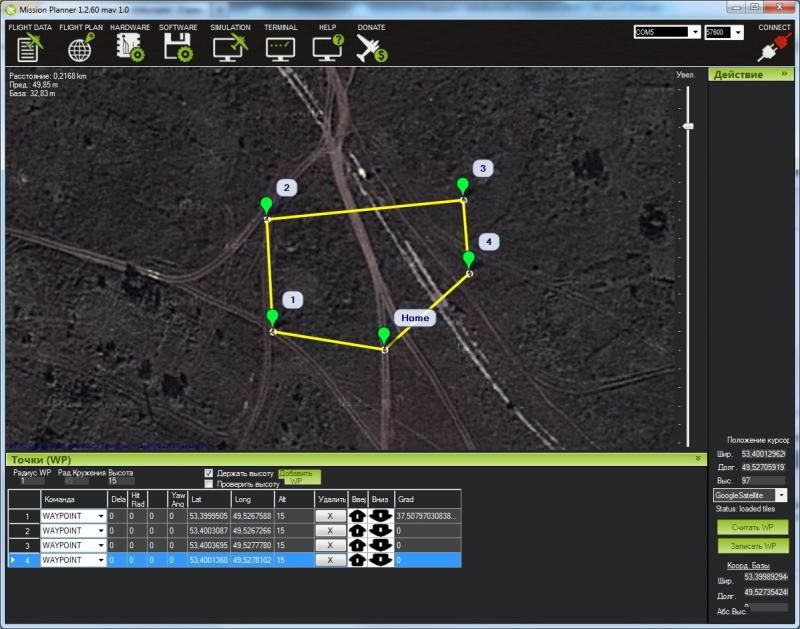
При пролете точек очень понравился разворот. Все плавно и начало разворота совпадает с концом подлета. А-ля как в крутых американских фильмах. Когда подлетел на 4ю точку, то Yaw не стал крутить и тем же курсом, как летел на 4ю, стал лететь домой. Немного напрягло.
Когда подлетел на 4ю точку, то Yaw не стал крутить и тем же курсом, как летел на 4ю, стал лететь домой. Немного напрягло.
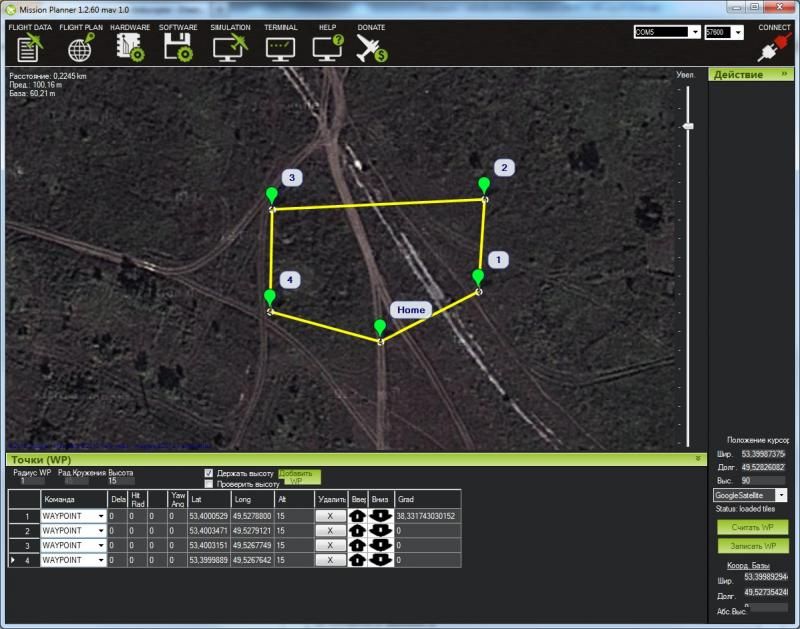
Посмотрел настройку (дословно не помню), стояло типа «Разворачивать на точку, кроме RTL». Поменял на «Разворачивать на точку», испытал. После этого при достижении 4й вроде бы повернулся на дом, но когда подлетел к дому на высоте 15 метров повернул нос на 1ю точку.  Запустил еще раз. Тоже самое. Дальше миссию сделал с облетом наоборот против часовой стрелки при прочих равных условиях.
Запустил еще раз. Тоже самое. Дальше миссию сделал с облетом наоборот против часовой стрелки при прочих равных условиях.
По словам Randy алгоритм RTL немного изменен, но у меня почему-то не отработал. Должно быть так:
1. stop and climb to the RTL_ALT (15meters)
2. turn and face home and fly home
3. stop above home for 5 seconds (RTL_LOIT_TIME)
4. turn back to original heading when it was armed and descend
5. stop at 2m and wait for you to take control (RLT_ALT_FINAL)
Думал, что при подлете дому повернет нос на 1ю, но опять развернулся в сторону чуть ниже 4й точки по картинке. Еще больше это не понравилось и переключил режим пока в «Разворачивать на точку, кроме RTL».
Понравилось как на коротком расстоянии (около 30 метров) делает спуск с 70 метров на 15. Все плавненько, почти без ступенек, иногда подруливает тангажом.
Испытал Circle. Радиус ставил 5 метров. На 2.9.1b сначала отлетал от точки на радиус и потом начинал облет. Сейчас сразу начинает облет по радиусу от предполагаемой точки. Стало все плавно и исчезли «шаги» по метру, про которые писал раньше.
Раз включил compassmot, то почему бы его не попробовать в стаб симпл.
Крутанул Yaw на 90°, полетел, все гуд (также было и раньше), крутанул еще , все гуд. Но для меня интересно, чтобы компас не уплывал с полетом в симпле с полностью выкрученным Yaw. Лучше не стало… Хоть и думал что помогут compassmot и переделанная плата питания.
Впечатления очень положительные, только что-то сломали курс к RTL.
Продолжил испытание миссий.
Опять наблюдал сход с точки, пропуск последующих и возврат домой.
Наблюдал отказ разворачиваться на точке, где поворот должен быть близким к 180° и зачем возврат домой.
Зато порадовал Circle. Пробовал с радиусом 5 и 10. Скорость (градусов/сек) от 5 до 50. Все ровненько и красиво.
В планере присутствуют несколько глюков:
1) После очистки миссии и записи пустой пытаюсь создать новую. Правой кнопкой щелкаю по дому, нажимаю Takeoff. Точка создается. При попытке установить первую точку с координатой мышка захватывает домашнюю точку с перемещает ее. Дальше двигаю примерно где стояла и только после этого остальные точки можно проставить нормально.
2) Попытался изменить параметр CIRCLE_RADIUS через стандартные настройки, так не хочет он его записывать. Один раз помог дисконнект и больше не удалось изменить. Потом такое же стало на CIRCLE_RATE. Нормально менялось из Advanced parameter list (из таблицы).
Скорость лоитера так и не получилось увеличить. Пробовал значения от 500 до 2000. Летает одинаково.
Не помню, как у меня отрабатывает просто RTL, но по миссиям вот так криво.
Сегодня попробовал еще, так сначала в одной миссии (допустим облет против часовой по 4м точкам) 2 раза при достижении точки дома разворачивал на первую точку (WP_YAW_BEHAVIOR=1), затем садился. Во второй миссии (по часовой) опять разворачивался на первую точку первой миссии и потом садился. WP_YAW_BEHAVIOR=1 поставил по рекомендации Randy.
Обещали исправить баг.
Баг в том, что при указанном RTL_LOIT_TIME 1200мс коптер не успевает развернуться. Как временное решение можно увеличить до 3000.
Если еще не было, список доработок можно смотреть тут: https://github.com/diydrones/ardupilot/issues
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.




Добавить комментарий