Изначально контроллер пишет не все логи, чтобы не засорять память. Для диагностики проблем и в частности вибраций может пригодиться данная информация.
Возникает вопрос: «Как включить в логах запись данных по вибрациям?».
Ответ:
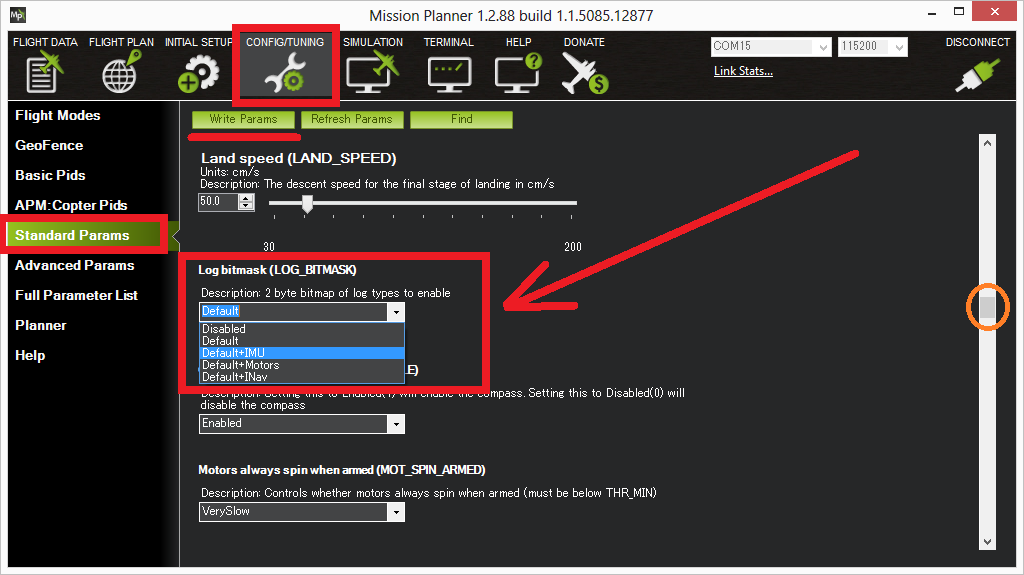 Включение лога IMU
Включение лога IMU
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Здравствуйте, Александр! В продолжение этой коротенькой заметки было бы здорово описать процесс загрузки, просмотра и анализа логов, описать также логи телеметрии. Спасибо.
Сергей, приветствую. Если у вас есть какие наработки или заметки по этой теме, то можете поделиться. 🙂 А так со временем постараюсь описать эти моменты.
Своих наработок нет, есть только вот это: http://copter.ardupilot.com/wiki/ac_measuringvibration/, но тут устаревшая информация про терминал и на английском. Есть актуальная информация на русском тут: http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/arducopter, но не знаю на сколько корректно здесь приводить ссылки на сторонние ресурсы.
У Алексея красиво все написано. Что-нибудь придумаем.
Процесс загрузки описан в статье «Журнал полета с контроллера APM». Пока только как руководство, как выполнить.
Сделал новую раму.( на 200 грамм легче )
И уехал в отпуск. ( с собой нет ни компьютера ни интернета толком )
До этого коптер хорошо летал во всех режимах.
А тут начались танцы с режимом лойтер.
Коптер в режиме stabilize отлично летает на сегодняшний день.
А в режиме лойтер чудеса: если я отклоняю стик руддера, то коптер пытается изменить курс, но при этом проваливается по высоте. Сообразив, что высота уже не та, он подгазовывает и набирает высоту, порой с запасом. И такая канитель, до дех пор пока не повернется на прежний курс.
Приятель подскащал что причиной могут быть вибрации.
Инерциалка не справляется типа.
Вчера на удивоение коптер нормально летал во всех режимах.
И даже вернулся на домашнюю точку.
Сегодня снова проблемы с лойтер.
ДУмаю, если и впрямь виьрации, то может у меня один пропеллер кривой.
Попробую сегодня пропы другие поставить.
Тока не пойму как вибрации могут влиять только на режим лойтер и не влиять на режим стабилизации ????
А может дело ваще в другом ???
Но на предыдущей раме небыло ни каких проблем.
Те проблемы, которые были раньше, я все решил…
Последнее время все было настроено.
Странно, наводки на компас? Что показывает крестотест в данном случае? Пока до калибровок.
Я в магнитогорске и окресностях.
Возможно магнитные аномалии ?
Вчера вечером полетал на других пропах — все норм.
Потом поставил те что были, тоже норм.
Думаю дело не в вибрации…
Я в отпуске. Компа с собой нет.
И интернета как такогого тоже.
Компас я настроил хорошо.
Разобрался что к чему.
Последнее время летал без проблем.
Крестотест норм.
Склонение задал вручную. Для Екатеринбурга.
Щас в башкирии. Горы фоткаю.
А может ли быть такое, что данные о высоте у барометра и GPS разные.
И коптер не может сообразить почему так.
Возможно ????
Высота может быть разная, но изменения показаний высот должны быть синхронными. Тут только логи смотреть.
Точно, вот сегодня на озере Банном ( якты-куль ) коптер в режиме лойтер вел себя не адекватно ( 5 попыток сделал ).
Затем не разбирая, уехал на то поле, на котором все работало вчера нормально.
Ха, а тут все работает нормально !!!! ( даже аккум тот же оставил и пропы )
Думаю это все же gps.
как понять gps дает ложную высоту или на компас влияют магнитные аномалии ?
Если это все-же GPS…
Можно ли настроить APM так, что-бы gps вносил корректировку по высоте только после 50 метров???
Если я не ошибаюсь, то поправку по высоте с gps можно вовсе отключить, как и уровень горизонта.
PS:
На этом поле ( на котором все работает нормально ) 3d-fix захватывается почти мгновенно, а на озере Банном приходится ждать какое то время, пока загорится постоянно синий индикатор.
PPS: тут даже интернет ловит 3Gh+. 🙂
На вскидку вряд ли проблема в высотах. Тут или снижение качества gps или влияние на компас.
Хм. Интересно. А как точно определить ?
Сейчас решил в другом месте попробовать.
Взлетел. Включаю режим loiter, вижу глючит, включаю stabilize ( хоть так поснимать )
Взлетел высоко, радиолинк оборвался, видимо зона беспроводной передачи данных.
APM включил режим RTL и совершенно спокойно прилетел на домашнюю точку.
Решил проверить второй раз. Совершенно точно прилетает на домашнюю точку.
А режим loiter не работает.
Это о чем то говорит?
Да тут везде так, только на одном поле работает нормально.
Логи можно посмотреть и попробовать выяснить причину, но раз у вас ноутбука рядом нет, то и попробовать под местность сделать калибровку наверно не получится. А так бы могли еще посмотреть на разницу в офсетах при калибровке.
Я уже в екб.
Посмотрю в логи.
Хочу к Вам на форум.
Но почему то в прошлый раз система отказала мне участвовать на форуме.
Без проблем. УЗ активна. Последняя активность uwrtey: 25 июн 2016