В данной статье будет рассмотрено, как скачать журнал полета с встроенной в контроллер вашего квадрокоптера микросхемы памяти. Загрузка осуществляется средствами Mission Planner.
Журналы полета хранятся в контроллере APM (Pixhawk) во встроенной энергонезависимой памяти. Могут быть считаны после полета. Каждый новый журнал полета создается во время процедуры арминга квадрокоптера.
В данной статье рассказывается, как можно выполнить чтение журналов с контроллера APM. Имеется два варианта в зависимости от того, какая версия прошивки у вас используется.
- Если используется прошивка контроллера 3.2 и выше, то загрузка выполняется по новой процедуре, т.к. в прошивке изменен код на чтение данных по MAVLink.
- Если используется более ранняя прошивка (3.1-rc5, 3.1 и другие до 3.2), то чтение осуществляется через терминал.
Рассмотрим оба варианта:
Загрузка журнала через MAVLink (FW >=3.2)
- Подключите ваш контроллер квадрокоптера к компьютеру, используя кабель Micro USB.
- Запустите Mission Planner и откройте окно Flight Data.
- В левой нижней части экрана найдите вкладку «DataFlash Logs» и нажмите кнопку «Download DataFlash Log Via Mavlink».
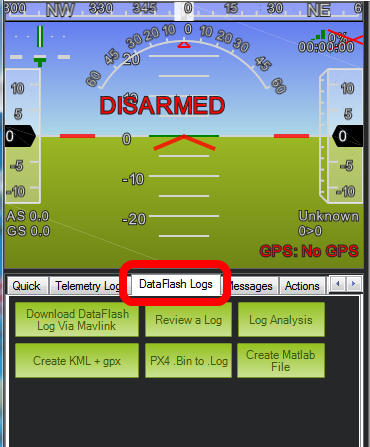
Открытие вкладки чтения журналов в Mission Planner
4. Появится окно, где будут перечислены содержащиеся в памяти журналы. Можно скачать либо все, либо только тот журнал, который необходим, например, для анализа вибраций или выяснения причин произошедшего сбоя.
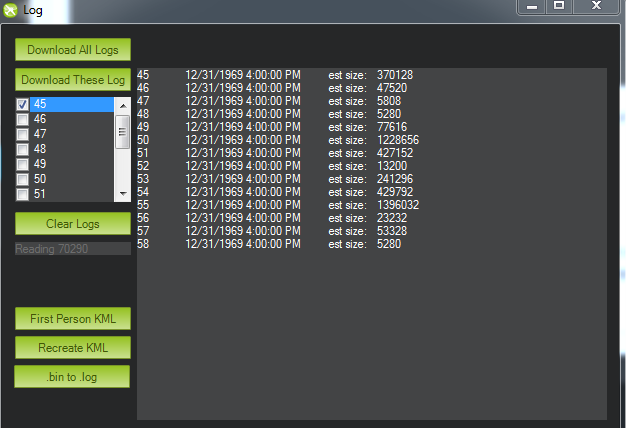
Выбор журнала полета для загрузки
В процессе загрузки будет отображаться строка с количеством переданной информации, в конце появится надпись Done, которая свидетельствует о том, что загрузка завершена.
Скачанный журнал сохранится в папке с MissionPlanner/logs. Внутри будет папка с названием типа рамы коптера, например QUADCOPTER (квадрокоптер).
В данном окне имеется возможность очистки журналов (иногда требуется при необъяснимых глюках), а так же имеется кнопка для конвертации журналов Pixhawk (.bin) в формат APM (.log). Так же можно построить точки полета для отображения в приложении Гугл.Земля (KML).
Видео процесса (с 4:20).
Загрузка лога через терминал (FW < 3.2)
- Подключите ваш контроллер квадрокоптера к компьютеру, используя кабель Micro USB.
- Запустите Mission Planner и откройте окно Terminal.
- В левой верхней части экрана нажмите кнопку «Connect APM» для подключения ПО к контроллеру в режиме терминала. Возможно придется переподключить контроллер к ПК и попробовать нажать кнопку быстрее.
- Нажмите кнопку «Log Download», далее появится окно с выбором журналов, аналогичное тому, о котором говорилось выше.
- Выбираем необходимые журналы и нажимаем кнопку «Download There Log». Начнется процесс скачивания журнала.
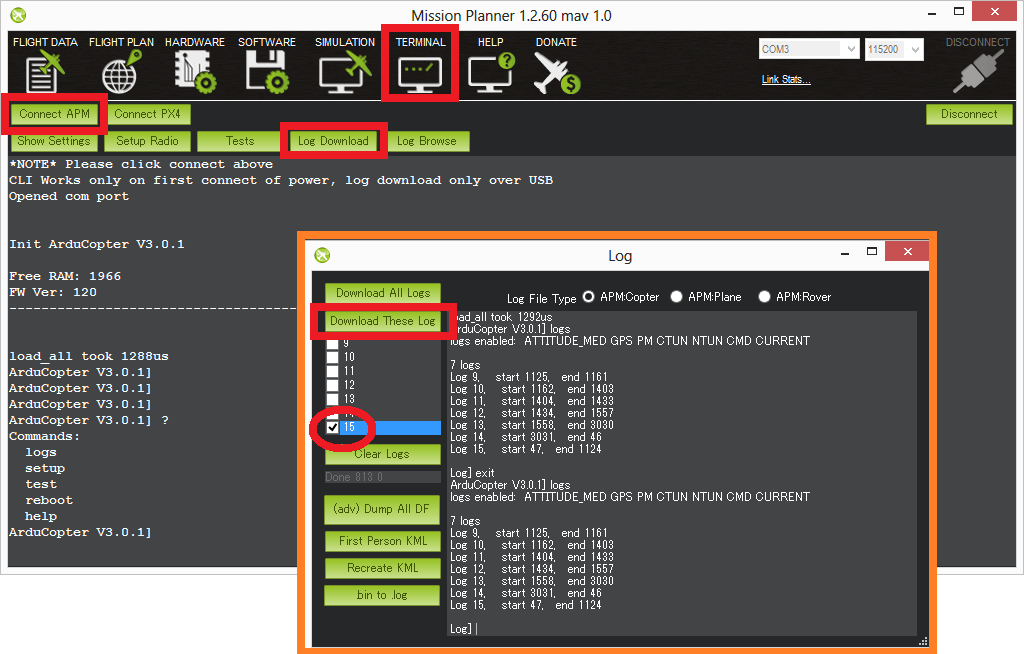
Загрузка журнала полета через терминал
Видео процесса.
В дальнейшем скачанные журналы полета можно анализировать встроенными средствами в Mission Planner, а также другими средствами такие как arduplotter.com или APM Log Analyser (так же можно скачать с моего Я.Диск).
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.






Ну вот. Респект и уважение. ))). Александр, спасибо.
Добрый день! у меня контроллер Multiwii and Megapirate AIO Flight Controller w/FTDI (ATmega 2560) не пишет логи, выдаёт сообщение (error receiving log list), может кто нибудь сталкивался с такой проблемой?, буду очень благодарен за подсказку как с этим справиться.
По AIOP вопросы можете задать на форуме в разделе Другие контроллеры.
Добрый день
Вопрос : а возможно ли на прошивке 3.21 — совсем отключить запись логов … ?
Возможно на всех прошивках. Установить Disabled. Сам не проверял. А зачем, если не секрет? 🙂
У меня вопрос,(может он оказаться вполне и глупый, так как я начинающий) вот я создал полет по точкам в мисПланер, сохранил на буке файл waypoints, подключил Чирик CX 20 по кабелю, как дать команду коптеру, чтоб он полетел по этим точкам, видимо нужно загрузить это файл waypoints в коптер. Можно с ноутбука дать команду чтоб он полетел по этому заданию. Вот именно этой информации нигде и нет (
Посмотрите это видео.
Подключаемся лучше через телеметрию. На экране Flight Plan в MP нажать кнопку «Загрузить WP-файл». После чего нажать «Записать WP». Но до загрузки и после полета всегда рекомендую делать очистку точек. Далее делаем арминг, выбираем режим Auto и даем газку. В случае чего будьте готовы перейти в режим Stabilize и вручную посадить коптер.
По подобным вопросам прошу обращаться на форум.
если квадрокоптер улетел после обновления и некорректно себя повел при возврате на точку(домой) летел боком после связь оборвалась,коптер был утерян Вопрос можно ли каким образом вычленить с помощью какой то программы журнал полета APP из смартфона который использовался вместе с пультом управления.Осталась CPS отметка на карте взлета и утери.Возможен ли запрос пеленга по частотам GPS ?