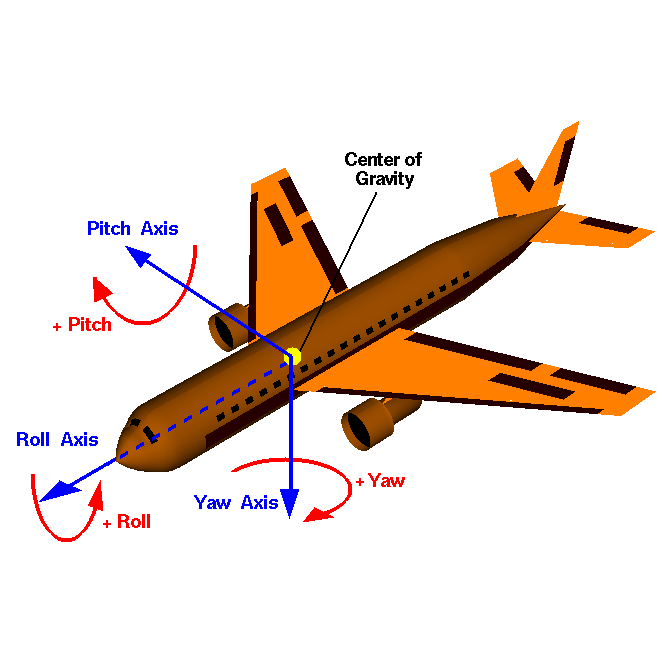
Здесь представлено возможное решение проблемы вращения по Yaw (рыскание).
Александр Павленко:
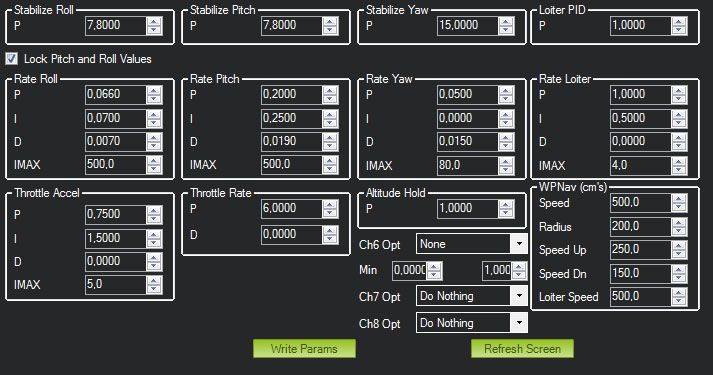
Вот скрин моих настроек ПИДов, с которыми коптер перестало крутить по Yaw.
Вообще пытались побороть проблему отката по Yaw после отпускания стика. Т.е. если панорамировать и резко бросить стик, то коптер чуть назад подруливает. Эта проблема еще осталась, по этому резко стик не бросайте а плавно замедляйте. Еще добавил экспоненту на Yaw +50 и расходы поставил 60% (включаю для съемки), что позволило смягчить поворот камеры.
з.ы. У меня Н рама с разнесенной массой, по этому возможно не всем такие ПИДы подойдут.
Алексей Козин:
пиды весьма «специфичненькие»
stabillize roll pitch yaw отвечающие за реакцию на ручку и команды системы навигации со стоковых 4500 увеличили в 2-4 раза.
обычно их оставляют 4500 на мелких спортивных аппаратах до 1кг и уменьшают до 3500 или даже до 3000 на аппаратах класса 5-7кг
стаб контроллер устанавливает целевые углы для системы стабилизации в пределах -45+45 град
при таком увеличении (15000 )малейшее отклонение стика или команда навигации дают практически максимальную команду рэйт контроллеру.рейт контроллер это штука которая обеспечивает стабилизацию, тоесть отвечает за достижение заданного системой ручного или автоматического управления угла по питчу ролу и яву исходя из текущего угла и существующей угловой скорости вращения рамы по каждой из осей.
результатом подобной модификации пидов низкие rate и высокие стаб прежде всего может стать излишняя чувствительность и даже дискретность по управлению (рэйт контроллер будет попеременно получать команды -45 и +45 без промежуточных значений, но резкость ответных действий задушена за счет того что рэйт контроллер крайне вялый), которую вы пытаетесь придушить экспонентами и низкими расходами по радио. экспоненты заданные для радио не распространяются на автоматические режимы поэтому в удержании позиции и в авто коптер будет скорее всего вести себя крайне нервно.
зы. если коптер плохо держит курс важно проверить соосность моторов, если реакция на команду с пульта по курсу вялая то надо было увеличить yaw rate p. если он не удерживает заданный курс, как бы плывет то ввести yaw rate i не более половины от P и отрегулировать
максимальный уровень корекции накопительной ошибки IMAX
Александр Павленко:
Алексей, пробовали разные варианты, но этим результатом доволен, что хорошо видно на видео. Правильно слушается стиков и не виляет. Если кто то добъется таких же результатов с кардинально другими ПИДами, то будет интересно взглянуть. Проблема с Явом мучала с самого начала, и смотрю у многих это является проблемой, вобщем то как и на НАЗе, она тоже носом любит крутить.
С настроками еще буду пробовать, ведь это случайные. Может получится еще улучшить результат. Кстати видео снято в Лойтере.
Александр Шапков:
то есть это относится и к ситуации, когда гекса иногда по курсу поворачивается на 10-15 градусов по часовой стрелке и возвращается обратно!???
Алексей Козин:
на тех моделях что у меня есть небыло замечено такой проблемы,
ставил яв бевиатор не менять курс и запускал автомоатический маршрут облета дачного участка по углам для отвесной съемки, некоторые фотки пришлось доворачивать но всего на 1-2 градуса
если интерсно могу дать ссылку на результаты съемки — убедитесь самиважно чтобы влияния на компас от разных силовых проводов небыло, хороший показатель когда комасмот не более 3%
иначе делая выравнивание по крену мощность может быть увеличена на определенный мотор который специфично может влиять на компасвторой момент соосность моторов по курсу, иначе мотор имеющий курсовой выкос в может оказывать обратное влияние на курс нежели этого ожидает апм
кстати «аппаратная» чувствительность рамы по курсу зависит от отношения размера пропеллеров к длине луча и шага пропеллера
чем больше пропеллер тем рама резче поворачивается по курсу при малейшей разности в скоростях вращения cw и ccw пропеллеров
чем больше шаг — тем больше чувствительность
на квадре 550 размера с 14*4.7 пропеллерами которые почти впритык в нее встают коэфициенты пришлось понизить почти в 5 раз иначе она не только была резка по курсу но и норовила скакать при курсовых воздействиях (непимер при задевании земли одной ногой при посадке)
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.



а не поможете разобраться, падает гекса, когда начинаю ее разворачивать, точнее рыскать, такое ощущение, что теряет сигнал и перестает реагировать на любые команды, в результате краш, по логам вижу, что выходное значение по yaw в районе 400, по остальным каналам 40 в этих каналам
На срыв синхронизации или отключение моторов не похоже? Попробуйте поэкспериментировать без пропеллеров, имитируя поворот. Это что за значения такие?
Окей спасибо, попробую, это значения выдернутые из телеметрии выходного сигнала
Александр может поподробнее раскрыть вопрос по яву,а то из цитаты alexeykozin «, как бы плывет то ввести yaw rate i не более половины от P и отрегулировать» не понятно что увеличить что уменьшить?
я ничего не понял что написано
но проблемы с явом лечатся:
— правильная установка направления вращения пропов,
— соблюдение номеров моторов, (можно запустить тест моторов из терминала)
— установка соосности моторов
что за занчения? бред какойто.
может его дизармил в полете? яв до упора влево — газ в ноль?
А еще при автотриммировании можно вращение по руддеру стиком погасить. АРМ эту корректировку запомнит.