Процедура «compassmot» помогает компенсировать влияние (интерференцию) на компас других компонентов (проводов питания, регуляторов, моторов, аккумуляторов).
Для более точной работы процедуры можно использовать 3DR power module (с измерением тока).
Первым делом снять пропеллеры, поставить, перевернув и сместив на одну позицию относительно рамы (имеется ввиду переставить пропеллеры так, что бы поток воздуха был вверх, и таким образом коптер будет прижиматься к полу). Зафиксировать коптер на ровной поверхности. Затем включить аппаратуру радиоуправления.
Процедуру compassmot делаю обычно через радио-модуль (через кабель USB менее удобно, но делать все так же). Подаю питание, за пару секунд успеваю подключиться к терминалу в MP, после чего надо написать команды setup и compassmot.
Если 3DR power module подключен, то увидим надпись «measuring compass vs CURRENT», если не подключен, то «measuring compass vs THROTTLE». Означает, что при наличии модуля зависимость рассчитывается от тока, а при отсутствии — от уровня газа.
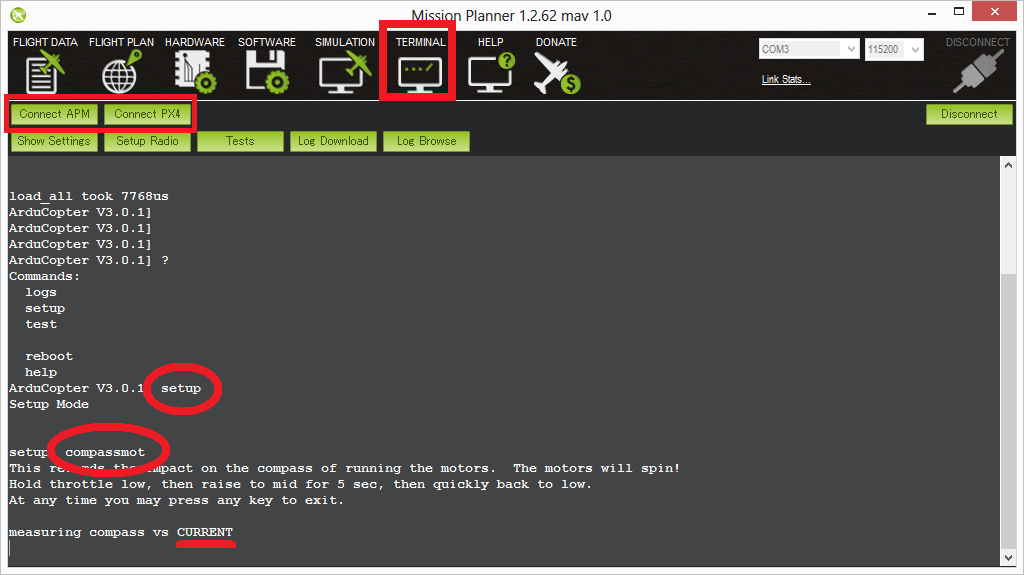
Compassmot в терминале
Моторы разок пикнут, но полную мелодию как при инициализации пищать не будут! После чего на долю секунды дать газку, чтобы проверить, начнут моторы вращаться или нет. Если моторы дернулись, значит все ок и теперь можем делать процедуру. Плавно повышаем газ до ~50-75%, дальше подержать 5-10 секунд и затем резко сбросить газ до нуля. Нажать на клавиатуре Enter.
После чего отобразится результат и делаем вывод:
- < 30% — хороший показатель, при котором Loiter и RTL должны работать хорошо;
- 31-60% — результат 50/50, т.е. в одних случаях все хорошо, а у придирчивых пользователей все плохо 😉 ;
- > 60% — надо плату убрать подальше от силовых проводов или использовать внешний компас.
Видео выполнения процедуры (на английском):
PS: Пока графический «compassmot» с планера не пробовал.
Быть или не быть?
Немного рассуждений на форуме RCDesign (начало) по поводу делать compassmot или нет.
Александр Старостин:
Интересно, тут коптерный гуру jabram не советует использовать compassmot. Точнее советует использовать его только для оценки влияния магнитного поля на компас, а затем выключать использование. И работать над уменьшением наводок (перекладывать, связывать провода и т.п.).
Вячеслав Перминов:
Возможно он отчасти прав.
Я не знаю точно, как оно работает. У меня такое предположение. Компасмот запоминает влияние потребляемого тока на компас в момент проведения процедуры и потом корректирует данные компаса в зависимости от нагрузки. Если при реальной эксплуатации элекртомагнитная картина поменяется (акк другой стороной вставили, разъем уложили не так как было) то есть вероятность неправильной корректировки компаса.
Алексей Козин:
вот вот, компасмот делают не во всех направлениях сторон света а в одном,
при этом может оказаться так что при моторы создают отклонение к примеру, условно когда компас «на север» но в этом случае может оказаться при стрелке на запад отклонение может совпасть с линиями магнитного поля и корекция как бы неуместна.
кроме того тяга одного мотора может создавать одно отклонение а другого — противоположное.
для того чтобы оценить все факторы влияния каждого из моторов при каждом из направлений компаса — нужен целый массив сохраненных параметров этой коррекции. его нет. значит компасмот не может адекватно работать.
поэтому суждение что компасмот хорош для оценки и бесполезен на практике — теоретически верно.
практически защищаю компас от магнитных полей, худший случай — компасмот 5%
Вячеслав Перминов:
Задумка с компасмотом верная. Источник отклонения у нас вращается вместе с аппаратом. Каждый мотор учитывать не обязательно. Достаточно знать на сколько и куда они суммарно отклонят компас. Если разъем на акке жесткий (кажись у фантома 2 такой), и конфигурацию не трогать — то должен нормально работать.
Стороны света не при чем. Если наводка относительно компаса постоянная, то ее можно вычесть(или прибавить) от показаний компаса. Хуже всего, если наводка полярность поменяет (напр. провода у акка перевернули). Тогда компасмот будет удваивать погрешность.
Update 22.11.2014: Вопрос целесообразности выполнения процедуры.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Может кому будет полезно — compassmot плохо работает с log calibration, и режимом «самообучения» компаса. После выполнения процедуры не спешим отключать коптер от usb и идти на улицу, крутим двигатели и в Mission planner смотрим, не уходит ли yaw.
А кто из них результат?
Mag off: -72.0309, 74.7821, -30.2270
или
Comp Vec: -0.05, -0.03, -0.28
Результатом compassmot должено быть одно число в процентах. Первое — это значения компаса, второе — коэффициент отклонения.
Сделал по вашей инструкции показало 2%.Это возможно или это неверный результат?Делал два раза.
Почему бы и нет? Хороший результат. Сколько расстояние от силовых проводов до платы/внешнего компаса?
Рама дохлый кот,под платой на расстоянии4 см идут по бокам 4 провода на 2 регуля,вся разводка по питанию сделана сзади.
Забыл добавить компас на борту (apm 2.5.2).
Это ОЧЕНЬ хороший результат. Мой личный рекорд — 9%.
Может кому пригодится. Если настроить датчик тока и напряжения и предупреждение по напряжению — то процедура Compassmot нормально не финиширует. Терминал выдает сообщение, типа «не могу измерить влияние моторов на компас».
то-есть надо убрать датчик тока, или достаточно отключить предупреждения?
Экспериментов не проводил, думаю — в настройках надо убрать тип датчика тока/напряжения на «нет».
Возьмем на заметку 🙂
В последнем MP compass/motor calibration это оно же?
В последнем MP compass/motor calibration это оно же? Мне терминале Mission Planner 1.3.21
ArduCopter 3.2.1 quad Показывает одни иероглифы
Верно. Этот пункт в настройках сделали ввиду вырезания терминала в свежих прошивках.
Собрал тут коптер, думаю, как бы учинить compassmot, не переворачивая и не переставляя пропы. Дело в том, что движки и пропы из кита DJI, их не перевернуть никак и не переставить. Можно поменять направление вращения движков на обратное — но тогда пропы открутятся (самозатягивающиеся). И обычных пропов нет под рукой.
А что, если просто прикрутить коптер накрепко к поверхности саморезами, чтобы не улетел?
От поверхности отталкиваться будет же. Может развалиться от таких нагрузок. ЛИбо повытается опасность поломки пропеллеров. Очень аккуратно!
У меня мысль, в таком случае я бы хоть взял квадратную коробку и поставил коптер на нее, чтобы 3/4 потока шло уже вниз мимо коробки.
Уже сделал. Заодно и стресс-тест, ничего не отвалилось.
Вот такая конструкция вышла —
Результат, правда, не гуд — 40 процентов, но оно и ожидаемо, все равно буду переделывать, это так, тестовая сборка.
а можно эту процедуру без пропелеров делать ????
Процедура compassmot делается именно с пропеллерами, чтобы нагрузка была. Соответственно токи больше — наводок больше. А это и надо учесть.
Хотел сделать compassmot, а после нажатия кнопки start в М.П.ничего не происходит, регуляторы не пищат и на газ не реагирует.В чём может быть проблема?