Основные ссылки

Прошивка 3.1-rc5 Acro, Sport
Немного о прошивках
Прошивка 3.1-rc5
Танец с компасом
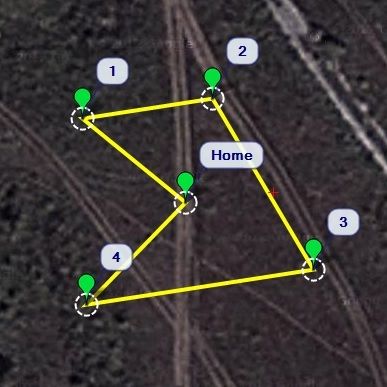
Режимы. GeoFence, WP save, Flip
Режим FollowMe
Прошивка 3.0.1