Здесь рассмотрим как настроить самый популярный GPS модуль u-blox NEO-6M. Даже если на сайте продавца написано, что модуль подходит для APM, то не факт, что в нем загружены верные настройки, поэтому нам необходимо сделать эту процедуру.
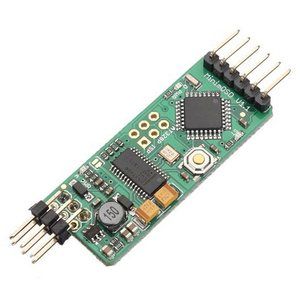
Вот так выглядят модули с RCTimer.com и MyAirBot.com:



На данных модулях GPS кроме самого модуля имеется flash-память для хранения настроек, конвертер логических уровней и стабилизатор питания 3.3В. На некоторых модулях конвертера может не быть, но память везде быть обязана! Если ее нет, то можно смело искать другой модуль. На модуле от MyAirBot.com на борту еще имеется внешний компас и светодиод для индикации 3D-fix.
Для настройки конфигурации нам понадобится:
1) Переходник USB-COM, например на микросхеме FT232RL (может быть и другой), который мы использовали для прошивки загрузчиков ATMega32u2 и ATMega2560.
2) Программа U-Center. Можно скачать с официального сайта по ссылке.
3) Конфигурационный файл с настройкой для APM. Скачиваем здесь. В архиве еще имеются сохраненные мной конфигурационные файлы.
Производим подключение переходника COM и модуля NEO-6M в соответствии с: VCC-VCC, GND-GND, RX-TX, TX-RX.

Подключение модуля GPS к FT232RL
Подключаем разъем USB переходника в ПК, устанавливаем по необходимости драйвер, в диспетчере устройств смотрим, какой назначился порт для переходника.
Устанавливаем программу U-Center на ПК, запускаем.
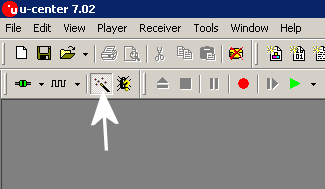
Нажмите кнопку с «волшебной палочкой» для установки автоматической скорости порта.
Выберите порт, который появился при подключении переходника.
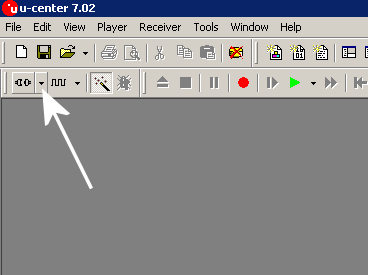
После подключения в нижней части окна должны увидеть зеленый значок, это значит что модуль успешно подключился.
![]()
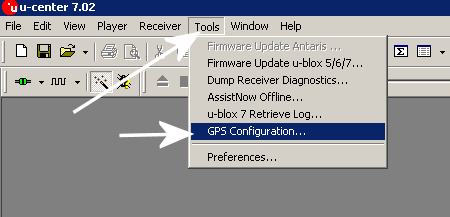
Нажимаем меню «Tools», «GPS Configuration» (GNSS Configuration в свежих версиях программы).
Выбираем конфигурационный файл «3DR-Ublox.txt» и в окне диалога нажимаем «Open». Ставим галку «Store configuration into BBR/Flash».
Нажимаем кнопку «File >> GPS».
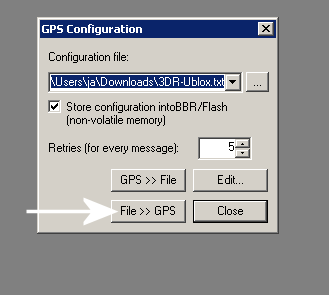
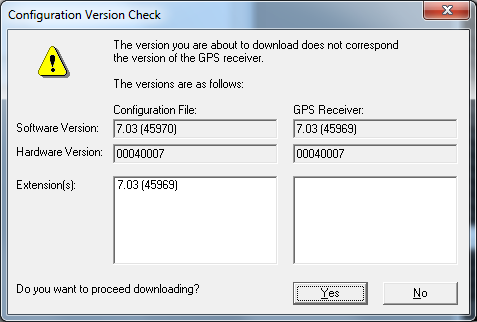
Появится окно с предупреждением о несоответствии версий конфигураций, где надо нажать «Yes» (если слева в колонке версия не отображается, то необходимо сбросить настройки модуля на стандартные. Для этого нажимаем меню «Receiver — Action — Revert Config», после чего пробуем загрузить настройки снова).
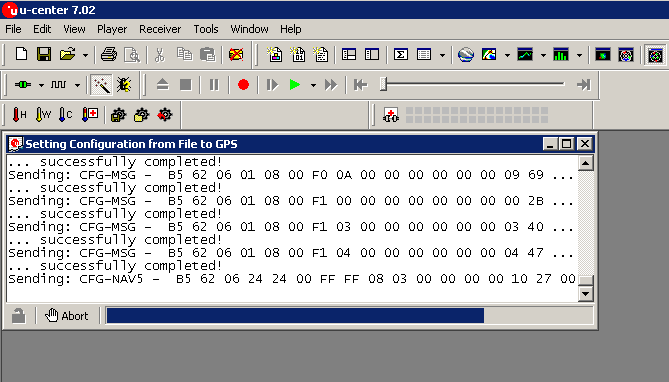
Далее начнется процесс загрузки конфигурации в модуль, о чем будет свидетельствовать движение индикатора прогресса. Если окно исчезло, значит все загрузилось, иначе отобразятся ошибки. Пробуем еще раз.
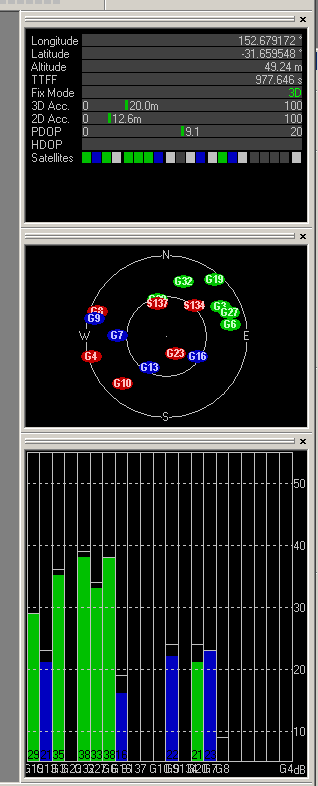
Раньше до заливки конфигурационного файла мы могли видеть цветные квадратики, полоски в окне спутников, а теперь их нет. Это нормально!
Чтобы успокоиться и посмотреть данные спутников, необходимо нажать кнопку «Debug».

Теперь полоски могут долго не появляться из-за того, что после загрузки конфигурации был произведен холодный старт модуля. Модуль должен заново получить данные от спутников, чему могут мешать естественные и искусственные объекты и т.д. Теперь просто ждем. Ждать можно долго, но обычно продохит 5-10 минут и данные начинают появляться. Модуль в этот момент лучше разместить у окна. Постепенно появится больше и больше данных.
В параметрах необходимо проверить параметр TP и настроить его. Цитирую Артема:
За моргание светодиода отвечает пункт TP (Timepulse), в выпадающем списке справа надо поставить «+1 risisng edge» и нажать внизу Send, чтоб настройка прописалась. Светодиод вновь радует глаз при 2D/3D Fix.
На данном этапе настройка модуля завершена и далее можно переходить к подключению.
Также можно воспользоваться другим способом настройки, используя плату APM в качестве связующего звена между ПК и модулем GPS. Для этого необходимо загрузить особую прошивку «APM2 / Ublox passthrough» на плату, которая качается по ссылке (+ прямая ссылка) и загружается через Mission Planner. ВНИМАНИЕ! Летная прошивка стирается и, после процедуры настройки модуля, необходимо опять загрузить летную прошивку, а так же произвести все настройки с нуля.
Ниже представлено видео данного процесса использования контроллера APM для настройки модуля GPS.
Update 15.06.2014:
Описание загрузки конфигурационного файла через контроллер APM.
Сергей Макаров:
Давайте с самого начала:
ПРОШИВАЕМ ЧЕРЕЗ APM:
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 9600.
Идете в U-Centre, загружаете конфиг, получаете ошибку, игнорируете.
Открываете среду Ардуино, в свойствах выбираете плату и порт.
Открываете пример: Файл -> Примеры -> Communication -> MultiSerialMega.
Редактируете две строчки:
Serial.begin(38400);
Serial1.begin(38400);
Жмете кнопку «Загрузить». APM теперь просто транслятор сигналов на скорости 38400.
Идете в U-Centre, меняете скорость на 38400, загружаете конфиг, уже не получаете ошибку, радуетесь.
Что может быть проще?
PS ну настройки APM ведь сохранили? Прошиваем любимую прошивку и восстанавливаем настройки только ручками!
Update 25.06.2014: Добавил ссылку на архив с конфигурационными файлами.
Update 11.08.2014: Видеоинструкция от Юлиана.
Update 14.11.2014: По просьбе Сергея добавил информацию от Артема по поводу параметра отображения 3D Fix светодиодом.
Update 25.05.2015/02.06.2015: Информация от Андрея об модуле ublox neo-m8n.
Update 02.06.2015: Информация от Ильи об модуле ublox neo-m8n.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





У меня ровно такой модуль, как на картинке, а провод к нему со стороны ардукоптера с двумя разъемами:+-TxRx и второй к I2C. Их обоих надо подключать?
+-RxTx для GPS, I2C для компаса. Если хотите использовать внешний компас, то подключайте (только на плате надо перерезать шейку между двумя площадками на обратной стороне).
Подскажите пожалуйста. Имею на руках ublox M8N, от компаса идут синий и оранжевый провода, а от GPS чёрный, зелёный, жёлтый и красный. Кто из них есть кто и где это посмотреть? Хочу подключить M8N к ПК, могу я это сделать без переходника USB-COM/модулятора? Могу-ли я перебросить провода на USB канал? Спасибо!
Цвета проводов ничего не значат и стандарта в данном случае не имеют. Смотрите/прослеживайте дорожки к контактам модуля GPS и компасу и сверяйде по даташиту. К USB возможно подключение только через адаптер com-порта.
А у меня с Ардупилота не заливается конфигурационный файл в модуль NEO-6M с Хоббикинга…
Добавил еще информацию в конце статьи. Попробуйте.
Проблема не с соединением с самим модулем. Сам модуль видится успешно, и ДРУГИЕ конфиги в него заливаются. А тот, который лежит на сайте Ардупилотов — не заливается, Ю-центр ругается на этот файл с конфигурацией.
Вот обсуждение на РЦ-дизайне http://forum.rcdesign.ru/f123/thread287781-35.html#post5092697 — и немного выше этого поста.
У меня в консоли сыплется какой-то мусор. Может надо как-то ПЕРЕПРОШИТЬ модуль? (с сайта Ублокса бин не заливался в модуль)
Что-то не видел такого ни разу. Одна из догадок: в программе u-center тип модуля верно выбран (Generation — U-Blox 6)?
Этот глюк ищется по строке «??:??:?? UBX NAV-STATUS»
Нашел описание такой же проблемы на DIYdrone — там тоже удивились, и посоветовали отправить назад продавану «на ремонт».
Ещё нашел упоминание на RCGROUPS — там одному товарищу удалось как-то перепрошить модуль, у него вроде всё заработало.
Я перепробовал уже все прошивки на сайте UBLOX.COM — ни одна не принимается модулем. Хотя должна подойти «Firmware V7.03 update for u-blox 6 GPS Flash modules and evaluation kits». Чувствую, мне придется куда-то припаиваться и чего-то шить программатором. Буду искать даташит на модуль. Или не маяться — и выбросить его в помойку?
В U-centr’е тип модуля выбран правильно. В конце концов, он иногда распознает отдельные пакеты со спутников. И изредка сигнал со спутника (одного, максимум двух одновременно) всё же идет.
>> Или не маяться — и выбросить его в помойку?
Если учитывать, что стоимость модуля 15 баксов, то можно оставить на запчасти.
Спасибо за информацию. Если что получится, то обязательно пишите.
Пишу! Я доконал-таки (починил) этот модуль! Выяснилось — потеря контакта центральной жилы на антенну. В итоге — отрезал кабель со стороны разъема, скинул разъем с платы, припаялсяпрямо на плату, залил всё термоклеем. На него же и посадил назад модуль антенны к самому модулю GPS. Тестирование на подоконнике, выходящем на лоджию дало УСТОЙЧИВОЕ видение 5-7 спутников. Сегодня его буду тестить на коптере. В консоли после операции — обычные пакеты — с временем и датой.
Короче — фабричная неисправность с Хоббикинга.
Всем владельцам модуля GPS NEO-6M с Хоббикинга (http://hobbyking.com/hobbyking/store/__31135__NEO_6M_GPS_Module.html?strSearch=NEO-6M), имеющим глюки — проверяйте целостность центральной жилы антенного провода.
Тимур, спасибо за информацию!
Алексей Козин кстати тоже говорил, что не плохо бы запаять это место напрямую, убрав разъем.
А у меня, после обновления файла конфигурации, перестал мигать светодиод, отображающий приём спутников. У кого-нибудь было так?
Было такое несколько раз. Но у меня все ок на модуле с аирбота. А дождались 3D fix?
Да, конечно, дождался 3D Fix, но не мигает. А как то боролись, когда было такое несколько раз?
Помогите решить аналогичную проблему! прошил файл конфигурации. В меню TP выставил ка надо, но индикатор не горит, хотя спутники захватывает. У меня Neo 6m
Почитайте внимательно эту страницу, тут всё есть.
Ссылка Артема, что ниже не работает!(
Попробуйте поиск по этой странице: TP5.
В программе u-center есть меню настройки TP5. Чуть выше TP!! В меню TP, как написано в статье я изменил настройки, но в TP5 я ничего не трогал пока.
прочитал тут http://forum.rcdesign.ru/f123/thread287781-63.html#post5697508 Буду настраивать как написано! Спасибо Сергей!
Итак, проблема решена с помощью вот этой познавательной статьи по теме: http://uav-drone.ru/2013/05/ublox-apm-25.html Там же находится и альтернативный файл конфигурации, дающий, по заверению автора, более точные результаты, нежели официальный. К сожалению, в полёте пока проверить не могу, но на столе всё работает хорошо.
>> А как то боролись, когда было такое несколько раз?
Не совсем понятно я написал. У меня такой проблемы не было. Было у других пилотов, но с родным файлом вроде тоже не получилось добиться индикации. Тоже вроде нашли другой файл конфигурации.
Не советую всем спешить ставить этот файл. Мнения могут разделиться. Я все-таки рекомендую использовать именно родной от разработчика, т.к. им виднее, как их код обрабатывает данные с GPS. Еще не плохо бы сравнить на разных модулях как подключен этот светодиод индикации.
А ещё было бы интересней найти информацию, как редактировать этот файл, тогда можно было бы просто активировать атрибут светодиода в файле разработчика и радоваться. Будет время, попробую поискать.
Поделитесь информацией 🙂
Безусловно))
К сожалению, инфы по теме конфигурации UBLOX в инете крайне мало, зато удалось выяснить, что конфигурирование осуществляется в самом u-center, нажав View-Configuration View. Методом сравнения дефолтного конфига и нового конфига 3DR-Ublox выяснилось, что за моргание светодиода отвечает пункт TP (Timepulse), в выпадающем списке справа надо поставить «+1 risisng edge» и нажать внизу Send, чтоб настройка прописалась. Светодиод вновь радует глаз при 2D/3D Fix 😉
Ещё можно добавить инфу по залитию альманаха спутников. У меня как только включился модуль первый раз — показал местонахождение где-то на Тайване, Вьетнаме. И медленно так дрейфовал к моему реальному местонахождению. Загрузка альманаха позволила очень быстро инициализировать модуль. Очень полезно при начале работы с модулем.
5yoda5, расскажите, где брать этот альманах и как загружать
Альманах скачивается автоматически в период работы приемника. Если оставить включенным на час, то все загрузится. Альманах актуален на неделю-две (точно не помню), так что вам везет с такими показаниями ровно на этот срок.Загрузка альманаха из Сети — это только помощь, чтобы быстрее первоначально поймать спутники.
В программе U-Center есть пункт Tools — AssistNow Online. В окне надо указать логин и пароль. Если поискать в интернете, то можно найти, как зарегистрироваться на сайте ublox и получить логин. Поиск дает следующий способ:Отправить письмо на адрес agps-account@u-blox.com и в ответ через какое-то время придет логин и пароль. Потом альманахи загружать можно из программы.
PS:
В статью информацию перенесу чуть позже.
Загрузка альманаха очень помогает при первичной инициализации. А час «в чистом поле» квадрик не со всякими акками пролежит. Гораздо проще дома загрузить альманах(когда модуль новый), а потом, в поле — уже «само собой» все заработает.
Всем привет. у меня ublox neo-6m. Очень долго пытался его заставить хоть как-то работать. в итоге оказалось что с дефолтными настройками хоть как-то работает. сегодня был первый удачный полет по GPS без крашей. Пока думаю оставить без конфига. Чем опасно незалитие конфига?
А как был сделан вывод, что с недефолтным конфигом не работает?
с периодичностью в секунд 10-40 вылезала надпись Bad Gps Health в планере. Наблюдались постоянные скачки позиции gps в стороны, около километра-двух от реальной точки. Это если спутники ловились. Но чаще всего даже спутников не было.
даже если были пойманы спутники 9-11 и радовал глаз огонек и надпись 3d-fix, то при переводе коптера в режим авто миссии или RTL, он заходил на заданную высоту и через секунд 3-5 резко ломился в сторону , с печальными последствиями
Т.е. наблюдения проводились несколько дней и не на окне?
Понаблюдайте несколько дней за логом в u-center с дефолтной и предлагаемой конфигурацией. Попробуйте загрузить старую конфигурацию, с которой мои аппараты летают.
У меня такие же симптомы были на модуле LEA-6H с компасом (брал на бангуде). И квадрик как-то неустойчиво себя вел. А в Лоитере вообще никогда не летал нормально. Загрузил KMZ файл в Гугл Еарч — там оказывается мой квадрик побывал на всей земле! ВСЯ планета была в «отметках» моего квадрика…
Причину глюка не нашел и не устранил.
Предполагаю:
1. Плохой контакт с антенной (аналогично с другим модулем, имеющимся у меня, правде в консоли пакеты идут «правильные»)
2. Возможно старая/неправильная прошивка (не конфиг!!!!). Пытался прошить прошивкой с сайта Ублокс.ком — не получается, ругается на неправильную скорость соединения. Пробовал на разных скоростях, какую надо так и не понял. Лежит пока «до лучших дней» в запасе.
еще забыл написать — квадрик 3DFix ловил, но иногда терялись спутники — ВСЕ, иногда вообще Ардушка теряла сам модуль.
Вот все то же самое у меня было. антенну даже припаял, вместо разъемного соединения. прошивка, если память не изменяет. 7.03 или 7.02 и она на neo-6m не шьется. на lea-6h должна шиться.
несколько разных конфигов которые были в сети заливал. та же шляпа происходила. в итоге несколько раз все сбросил к дефолту и о чудо! через пару часов само все заработало и вот уже 2й день с дефолтным конфигом все прекрасно ловится(на окне в том числе 5-7 спутников, в поле 10-12)и летается. Зависает, лоитерится, возвращается домой вообще шикарно. Вот мой изначальный вопрос и был по поводу дефотных настроек: ЧЕМ ЭТО ОПАСНО? если ничем, то так и оставлю пока
Решил свою проблему и разобрался в причинах. Дело в том, что в конфиге с Ардупилотов делается две основных настройки — отключается протокол MNEA (включается протокол UBX) и ставится скорость порта UART1 — 38400 (дефалт — 9600).
После загрузки конфига модуль воспринимает только UBX поток от спутников. А у меня он шел с провалами (http://forum.rcdesign.ru/f123/thread287781-38.html#post5154981). Настройка скорости обновления GPS до 1 герца давала лишь оттяжку по времени глюка. Когда проходит «провал» потока — МишнПланнер пишет «бэд ЖПС хелтч».
Когда сбросил конфиг на дефолтный — работает протокол MNEA, UBX не работает. Только выставил скорость порта UART1 на 38400. Подоконный тест показал хорошие результаты. На подоконнике — 6 спутников держит (hdop 4,6), в провалах до 4 спутников. Улетов «виртуального квадрика» в МП не случалось, GPS не отваливается, 3DFix на подоконнике (выходящем на лоджию) держит ЖЕЛЕЗНО, несмотря на плотную облачность и льющий дождь.
Так что загрузка конфигурационного файла иногда не помогает, а вредит. Надо тестировать как ведет себя каждый отдельный модуль (я смотрел в ублокс центре).
Понаблюдайте теперь за поведением коптера в полете, чтобы сравнить, как будет работать с NMEA. Ввиду дешевизны модуля предполагаю, что присутствует брак, поэтому UBX может у вас не работать. В код арду я не лез, поэтому не скажу как правильней и лучше. Но я бы не стал сильно отклоняться от рекомендаций разработчика, а проще бы купил новый модуль.
В своем посте я ошибся — я скорость порта не выставлял. Я просто не знаю, как это делать с протоколом MNEA. усли включаешь в конфигурации скорость порта — то включается протокол UBX и начинаются дропы.
Пытался подобным способом вылечить заначенный LEA-6H — не выходит. Сейчас пытаюсь ПРОШИТЬ модель. Пока не получается.
Возникла проблема с LEA-6H.
Подключаю к FDTI как надо. Но когда подключаю к ПК (видит, что СОМ4) не загорается зеленая лампочка внизу. То бишь вообще его не видит.
Что может быть?
И еще вопрос: получается, второй шестипиновый разъем вообще не используется для прошивки?
http://i66.fastpic.ru/big/2014/0728/a2/26892243e695d24cacbf4b246f4b35a2.jpg
А вам не кажется, что не в тот разъем вы подключаете адаптер FTDI?
Где-то вы неправильную распиновку нашли.
Верхний разъем — это i2c для компаса (к нему проводники и идут).
Нижний разъем идет к GPS. Вам надо подключаться туда.
Шестипиновый он потому, что скорее всего шина i2c там тоже есть параллельно верхнему разъему.
Не знаю… Тогда какая распиновка у нижнего? На просторах интернета это вряд ли можно найти…
Если можно, напишите пожалуйста…
Попробуйте проследить. Землю и питание думаю не трудно будет найти. Питание идет к стабилизатору (мелкая микруха с 3+2 ножками). RX и TX можно прозвонить к модулю, заранее посмотрев datasheet. SDA и SCL компаса думаю не трудно будет найти, прозвонив контакты 4 и 6 пиновых разъемов. Ну и методом исключения будет еще проще найти RX и TX модуля GPS. Их перепутать можно и со второй попытки обмен данными с модулем пойдет. Главное не перепутайте питание.
У меня фигня какая-то… Уже и GPS прошил (LEA-6H), но в МП показывает, как будто коптер куда-то улетает… Еще, кстати, пишет NO FIX (может потому что дома)…
В режиме Loiter пытается куда-то улететь. Что это может быть?
И еще: как узнать по светодиодам, что спутники найдены?
Индикатор 3D Fix на плате — синий светодиод. Мигает — ищет спутники, горит — нашел. В планере в левом нижнем углу карты пишется, сколько спутников используется. Для хорошего удержания необходимо, чтобы HDOP был ниж 2. Без 3D Fix не советую включать Loiter — ничего хорошего не будет.
prearm:high gps hdop
что это такое???
естьт такая инфа—HDOP — важный параметр, характеризующий точность по горизонтали.
Можно добавить и другие параметры — PDOP и VDOP. Все они часть NMEA данных.
Это значит, что у вас HDOP хуже (больше) 2 и процедура предполетной проверки вам об этом говорит и не дает сделать арминг.
А я вот ни как не могу добиться подключения neo-6m к u-center 🙁
на антене диод горит зеленый, переходник определился как Com8. В программе при нажатии кнопки connect внизу иконка зеленой не становится. порт com8 скорость 9600, autobauding активировано. Может быть я не так припаял tx и rx к переходнику, но я пробовал и на оборот.
—
На самой антене у меня не подписаны выводы я подключил black-GND, Red-VCC, Green-TX, Yellow-RX. так ничего. если поменять местами rx и tx то на переходнике начинает мигать tx. в U-center при этом ничего не происходит.
—
Жаль — заспамил ветку. Проблема оказалась в драйвере ком порта. версия драйверов CDM v2.08.30 решила проблему.
Бывает такое. Удачных полетов!
При обратной сборке разъема оторвал один из проводов от клемы. https://www.dropbox.com/s/j2fa472b7zkgzvf/2014-09-30%2011.05.00.jpg?dl=0
вот красный. Не подскажите, что это за тип разъемов вообще, можно ли их приобрести, и как обжимать 🙂
Разъем называется DF-13, но под таким названием продается 3 разных пластиковых штекеров. Купить можно в Китае, например на aliexpress.com или banggood.com.
Просто интересно, а как остальные разбирают этот разъем не повредив ничего при креплении проводков к usb-com переходнику. Может как вариант взять кусочек исправного проводка с зажимом от другой связки и подпаять к gps’ному проводку?
АККУРАТНО иголочкой поддеваем пластиковый шпенечек и вытаскиваем провод с обжатым коннектором из разъема. Да, с первого раза не получится. Потому что надо держать разъем, тянуть провод и отгибать пластиковый шпенечек иголочкой. Умея разбирать этот разъем, у меня не всегда выходит с первого раза вытащить. Зато, если разъем раздолбанный — эти проводочки сами вылазят (когда не надо). Так что тип разъема — фиговастенький, на многократные передергивания не рассчитан. Учитывайте это.
Александр, просьба добавить в инструкцию по прошивке GPS u-blox информацию о том, что после прошивки модуля необходимо проверить в конфигурации параметр «Timepulse», чтобы убедиться в том, что синий диод будет показывать 3D Fix.
Цитирую Артёма: «… за моргание светодиода отвечает пункт TP (Timepulse), в выпадающем списке справа надо поставить «+1 risisng edge» и нажать внизу Send, чтоб настройка прописалась. Светодиод вновь радует глаз при 2D/3D Fix ;)»
Сергей, спасибо! Добавил.
Купил навигационный модуль ublox neo 6m, подключаю к ПК через FTDI ft232rl. Спаял по схеме rx-tx… и т.д. Модуль подключается к пк, устройство есть, СОМ порт присвоен, горит красная лампочка на модуле, а вот ublox center само устройство не видит, зеленым порт в нижней строке так и не загорается, то есть не видит модуль. В чем может быть проблема? На фото, собственно сам модуль
—
без фото)
Сначала проверьте FTDI эхом на работоспособность. Вдруг у вас подделка и надо драйвер постарее. Дальше подключении u-center поставьте скорость на автомат, попробуйте поменять местами RX и TX, подключаемые к модулю GPS.
A FTDI какое напряжение 5 или 3,3- у меня 1 модуль от 5 сгорел.
На модуле должен быть стабилизатор 3.3В свой. Если есть, то с FTDI надо подавать 5В, если нет (что вряд ли), то надо подключать 3.3В и с FTDI и с контроллера.
Заливал файл через APM. В текстовой консоли лезет ERROR: txbuf alloc
3dfix получить не удалось. Около часа на окне. Телефон, лежащий рядом за это время обловился спутников. В МР модуль виден.
Трудно что-либо сказать. Пробуйте другие способы.
Пробуйте наоборот сбросить конфиг к дефалтному. Не со всеми модулями конфиг отрабатывает как надо.
Похоже, тоже с проводом беда. Скину/накинул разъём — сразу фикс. Потом опять пропал. Буду паять.
Да, эти разъемы — известные предатери…
В общем, после пропайки фикс поймал. Но в текстовой консоли так и прёт ERROR: txbuf alloc. Интересно, что это значит.
Вы пропаяли разъем. Проверьте контакт антенны до ножки самого чипа. Мне один раз пришлось убирать разъем на модуле. После припайки антенны напрямую к плате — модуль заработал.
Я отрезал разъём. И подпаялся проводом прямо к плате. Тестером проверил все соединения, вроде всё пашет. Но лезет эта надпись…. Нашёл 1 такой случай в гугле, но там у человека и фикса не было и надпись была. У меня\ и надпись и фикс.
Я надеюсь, вы меня поняли правильно — нужно было убрать антенный разъем с платы модуля.
Попробуйте сбросить конфиг на дефалт и понаблюдать за сообщениями в порту.
Да, именно так. Я убрал разъём с платы. Для страховки снял экран сплаты и прозаонил от места впайки провода до контактов чипсета. Ещё замечено, что ошибка прёт только при использовании протокола ubx. Если включить принудительно Nmea, ошибки нет. Знать бы за что она отвечает, т.к. в остальном модуль абсолютно рабочий. После удаления разъёма холодный старт на улице одна минута. После выключения питания я отъехал на 20 км. Модуль поймал фикс за время запуска MP. Ещё вопрос, модуль с юбкой. Как его монтировать на коптер? На штыре или прямо на верхней платформе поставить?
Вот и оставьте с включенным NMEA, но установите правильно скорость порта (38400), чтобы АРМ понимал модуль. Это протокол GPS данных, такой же, как и UBX. Только учитывайте, что в последних прошивках АРМ (кажется в 3.2) — отключили протокол MNEA.
У меня есть модуль LEA-6H, который при отключении протокола NMEA сыпал ошибки в буфер. При проскакивании ошибок, у АРМ срывало крышу и он мне писал «bad GPS healht» в статусе в МП. Мой вам совет — как все настроите в модуле, подключите его к АРМ, зайдите в МП, и понаблюдайте — как у вас будет себя вести «виртуальный коптер» на карте в МП. При «подоконном» тесте допускаются бултыхания туда-сюда — чем они меньше, тем больше точность модуля (учитывайте, что при «подоконном» тесте реальное местоположение коптера вряд ли совпадет с тем что на карте). Самое главное — проследите, чтобы в течение как минимум часа-двух — ваш «виртуальный коптер» не попилил бы «куда-нибудь в Китай по своим делам». При этом количество пойманных спутников стремится к нулю. Что это у меня было — ошибка всей GPS сети или сбой конкретного модуля — я так и не понял. Пытался прошить (не залить конфиг, а именно сменить прошивку) модуль — ничего не вышло. Отложил этот модуль, как работающий, но ненадежный.
Хороший знакомый спаял мне модуль GPS/Glonass. Так этот модуль лишен подобного глюка. Пока склоняюсь к версии, что это периодический глюк всей GPS сети (не забываем, что GPS — американская военная система, и вспоминаем политическую ситуацию).
Что касается «юбки» для модуля — то обычно её монтируют «крышой» над коптером, а антенна модуля смотрит вверх, являясь верхней точкой усеченной пирамиды. Считается, что эта «юбка» — экранирует наводки на антенну и якобы усиливает сигнал. Народ говорил, что вроде так и есть. Если у вас модуль совмещенный с компасом — то гораздо полезнее будет установить этот модуль на «ноге», удалив микросхему компаса (и заодно антенну GPS) от основных наводок (силовые провода коптера).
В общем я купил другой модуль, другого сборщика. И то же самое. Кроме этого лога всё работает. Забил, летаю так 🙂
Положил на ночь на подоконник. Приём там ни к чёрту конечно и днём не ловит вообще. Пока фикс есть, виртуальный коптер болтается рядом +- 100м, в зависимости от спутников. Как только фикс пропадает, коптер улетает всё время в разные стороны. Но настроек на плате я пока не делал никаких.
Товарищи помогите найти конфигурационный файл для ublox neo 7N…спасибо))
У меня проблемка FDTI адаптер с гордой надписью Турнига не видит ни Ублоксовский нео6м ни медиатековсий модули но без проблем конфигурирует минимосд в терминале по петле тх-рх символы гонит без ошибок Вопрос если я подключу не через эмулятор а через сомпорт материнки естественно с внешним питанием я не спалю модуль?
Спасибо
Не понял. Что имеете ввиду под эмулятором? Что собрались подключать к COM порту материнки?
при подключении через Fdti адаптер U-Center и MiniGPS не видят соответственно ублксовский нео6м и медиатековский модули могу ли я подав 5 вольт питания на модуль подключить тх и рх ну и землю с сом порта компъютера
Пришел neo-7m, подключаю к FDTI, на нем ничего не горит. Собственно ничего и не находит — проблема в модуле или настройки какие должны быть. И еще — батарейка на модуле разряжена в 0 ((( может из-за этого?
Делайте все, как написано в статье.
Это может быть не батарейка, а ионистор, тогда это нормально. Зарядится. Проверяйте поступающее на нее напряжение.
Так и не могу подключиться ( на модуле должен гореть хоть один диод при подключении питания? на FDTI диод приемки не моргает совсем…
Покажите картинку вашего модуля, лучше хорошее фото. Ну я бы пошел путем проверки питания сначала.
1. Доходит ли 5В по проводу к модулю?
2. Живо ли стабилизатор 3.3В? Что на выходе?
3. Проверить FTDI эхом, если используете ее впервые.
4. Поиграться в ucenter с подключениями на рызных скоростях.
5. Поменять местами RX и TX, подключаемые к модулю. Бывает, что и их китайцы путают (точнее делают по американскому стандарту).
В общем проверил вход — 5в. На батарейку ничего не падает. Стоит стаб lg33 на входе 5в, а вот выход мертвый ((( блин… есть ли смысл его менять? может его нерабочесть не причина, а следствие…
Нормальный случай. Он мог сгореть просто при первом включении. Смысл менять конечно есть, можете взять любой другой и даже навесом напаять. По моделям посмотрите статью Проблема стабилизатора напряжения 3.3В. Следствие вряд ли, если только полярность не путали.
У меня Neo-6m периодически в мишин планере показывает NO GPS. При подключении через FTDI сигнал со спутников ловится, но раз в 5-10 секунд полностью пропадает со всех спутников. При сбросе на дэфолт провалы сигнала в u-center уменьшаются. Вычитал в этой ветке что если отключить ubx протокол то ошибок будет меньше — так и сделал — провалы исчезли вообще. Но вот незадача — после сохранения и выдергивания usb кабеля, через пару часов снова подключаю — ubx снова включен!!! Как??? Будто конфиг сбрасывается на дэфолт. Включил мигание диодом при 3D FIX — после отключения на несколько часов диод опять не мигает и ubx включен. Вопрос — как записать конфиг в него в качестве дэфолтного??? чтоб после сброса выставлялись мои настройки?
Проверяйте питание на флешку, может элементарно не доходит. При рабочей флешке конфиг должен записываться в нее при сохранении в ucenter.
Простите за глупый вопрос, но на neo-6m флэшки кажется нет. или я ошибаюсь?
С модулями ublox флешка должна быть, именно там и запоминаются настройки. А на MTK настройки жестко прошиваются в сам модуль.
Подскажите пожалуйста как прошить гпс Neo-7N ? и где для него взять прошивку? Если можно, дайте ссылку.
Имеете ввиду конфиг? Откройте в программе конфиг от Neo-6M, запомните настройки. Дальше я бы рекомендовал для Neo-7N сделать сброс и вбить настройки вручную. Файл при этом не загружал бы.
Подключил ublox LEA-6H к АРМ. При «подоконном тесте» имеются кратковременные улеты (при изменении hdop и количества принимаемых спутников) на 500 метров время от времени. Т.е как я понимаю все работает правильно. Есть ли смысл подключаться к u-center и заливать свежий конфиг? Как я правильно понимаю конфиг для ublox LEA-6H и NEO-6M одинаковые? Просто пока еще нет переходника USB-COM. А через АПМ не хочется заливать конфиг.
Основная настройка в конфиге — отключение протокола NMEA, чтобы остался только UBX. Для LEA-6H должно подходить один к одному. Смысл, наверно, все-таки есть, раз разработчик рекомендует.
500 метров улеты виртуального коптера при подоконном тесте — это многовато. Возможно будут проблемы с режимом Loiter. Если коптер будет унитазить или он куда-нибудь полетит при активации режима, значит и RTL нету веры. Значит единственный фэйлсэйф для вас — автопосадка.
Тестировать авторежимы на коптере аккуратно — чуть что не так, сразу в стаб без опций!
GPS как на картинке, спутники в UBLOX видит… а вот конфиги ни заливает ни считывает…
всё время этот … timeout occurred without receiving an answer. Retrying…! выдаёт…
Адаптер UART исправен? Драйвера рабочие стоят (с другими устройствами удается связаться)? RX, TX местами пробовали менять?
Да, пробовал, спокойно могу поменять настройки телеметрийного модуля.
Драйвера стоят для китайского клона FTDI 2.08.14.
До этого один раз уже заливал конфиг для OpenPoilot CC3D, мож там была строчка, что его в режим чтения только настроила?
Прошу помощи у сообщества. Использую neo-6m, внешний вид — в пластиковом таблетообразном корпусе, выходит из него 2 провода — gps и магнетометр. Первый раз прошил конфигурацией по приведенной инструкции, ошибок не было. Но долго тупил с поиском спутников на подоконнике, решил повторно загрузить. Во всех случаях использовался APM в качестве UART-адаптера. При второй попытке видимо я что-то сломал, потому что
1. зеленый значок подключения не горит, а мигает. скорость, номер ком-порта и т.д. — всё осталось как было
2. при попытке загрузки выдаёт ошибки
3. в binary console падает какой-то мусор
Как его сбросить полностью ??? Какие варианты?
Удалось всё вернуть. но проблема в том, что несмотря на успешную загрузку конфигурации, похоже она не сохраняется. Поскольку в диалоге загрузки все равно указывается первоначальная версия
Сброс — Revert config.
Из вариантов — попробовать отпаять флешку и сравнить заливку/сохранение параметров.
Сегодня тоже поимел такую же проблему. Вам удалось побороть?
—
Уточню свой вопрос. Как удалось побороть проблему:
1. зеленый значок подключения не горит, а мигает. скорость, номер ком-порта и т.д. — всё осталось как было
2. при попытке загрузки выдаёт ошибки
—
Ещё добавлю, что APM видит приемник GPS, есть 3d Fix при четырех спутниках, HDOP 5-6. То есть проблема, похоже, в U-Center. Модуль GPS подключаю к компу через APM с прошивкой GPS_Ublox_passthrough.
Антенна не повреждена? На проводе антенны разъем не окислен, контакт хороший?
А на улице пробовали смотреть на количество спутников?
Нет-нет, на HDOP не жалуюсь, это в комнате так ловит, даже не на подоконнике. На улице вообще отлично ловил до моих экспериментов с u-center. Но, думаю, и сейчас будет хорошо ловить. Антенна распаяна на обратной стороне платы модуля GPS, разъема нет. Модуль такой: http://www.banggood.com/APM-Flight-Controller-Set-APM-2_6-6M-GPS-OSD-Radio-Telemetry-etc-p-920659.html
Проблема именно в том, что конфиг в u-center не заливается, сплошные ошибки. Можно было бы грешить на кабель, но модуль подключен родным кабелем через APM. Кабель я прозвонил. Revert config не помогает. После нажатия кнопки Debug u-center шлет параметры в модуль, но на графиках ничего не появляется. При этом в MissionPlanner всё отлично, как и было до того, как я начал экспериментировать с конфигом в u-center.
Подключал другой модуль GPS к u-center — кнопка Debug работает, пакеты и спутники на графиках видны, так что думаю, что проблема не в компьютере и не в драйверах.
Покажите, что за ошибки.
На каждую команду, отправленную уцентром в ресивер идёт ошибка failed due to timeout.
https://dl.dropboxusercontent.com/u/91522736/forum_pics/u-blox.err.txt
На какой скорости соединяетесь с модулем?
При заливке конфига, в первой трети (или четверти) следует команда установки скорости ком-порта. Кажется, устанавливается 38400, и Ю-центр теряет модуль. То есть получается, конфиг проливаем один раз (первую часть), потом меняем скорость соединения (авто не верьте, работает дибильно), потом запускаем заливку конфига ещё раз.
Обычно на 38400, но пробовал разные: 9600, 57600, пару раз все доступные перебирал. Два раза подряд лить конфиг тоже прбовал неоднократно.
В итоге вот что помогло. Ниже Андрей привёл ссылку на видео https://www.youtube.com/watch?v=zV3inGauUec Владимира Максимова по загрузке конфигурации через APM. У Владимира была такая же проблема, как у меня.
Надо не отключая APM от компьютера, снова залить в APM коптерную/самолётную прошивку, подключиться MissionPlaner’ом (Mavlink), и подождать, пока появятся спутники (3D Fix ждать не обязательно). Затем, опять-таки, физически не отключая APM от компьютера, залить в него прошивку Passthrough, и подключиться u-blox’ом. После этого в u-blox’е пойдут данные от модуля GPS.
У Владимира после этого получилось залить конфиг из файла, ошибок не было вообще. У меня часть параметров из файла загрузилась нормально, а часть с ошибками. Повторная загрузка конфигурации — аналогично с ошибками. Мне пришлось вручную установить рекомендуемые для APM значения (PRT, RATE, Airborne<4g и т.д.)
Потом ещё настроил мигание диода TP5, как советует Davest: http://forum.rcdesign.ru/f123/thread287781-63.html#post5697508 — отлично получилось, спасибо, Александр Долгин.
Пока ещё не летал, loiter не проверял, получится только в выходные.
А в конфигурации APM, хранятся все-все калибровки и настройки? т.е. если я после перепрошивки туда-обратно скормлю файл конфигурации, ничего не надо будет перенастраивать?
Да, надо нажать Save в Full Parameter List. Потом, после возврата на коптерную прошивку, Reset (на всякий случай) и Load.
Есть где-нибудь схема от Ublox Neo-6M в таком корпусе http://www.parkflyer.ru/product/1210492/
В результате краша отвалился один smd -элемент, судя по всему транзистор. непонятно какой впаять туда
описка, прошу прощения — резистор конечно. если замкнуть отвёрткой, то модуль работает.
Я думаю это обычная схема включения модуля GPS.
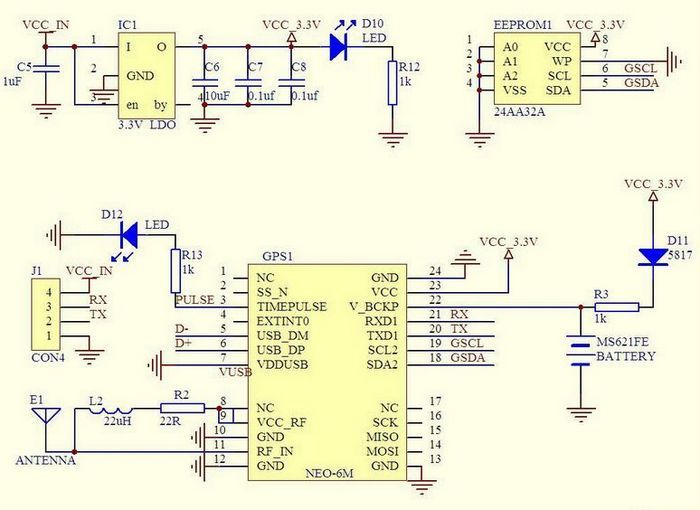
Если деталь от обвязки компаса, то в даташите должна быть типовая схема, жаль что в даташите модуля GPS такой нет.
Спасибо! Такую схему находил, и вот сомневаюсь теперь. Элемент (smd-резистор вероятнее всего) был на дорожке, идущей от 20 ноги GPS модуля, т.е. это TX. И именно этот элемент оторвало (соответственно и не работал модуль), под лупой чётко видны следы. Взял пока просто запаял перемычкой, всё работает, но какие интересно возможны последствия ? …
Работать — будет. Просто учтите, что этот резистор стоял на входе на модуль, и служил токоограничителем. Если что-погорит дальше по цепочке (если что — это если будет превышение на порту).
То есть пока — пойдет, но по-правильному лучше при первой возможности туда резистор всё-таки поставить.
Номинал к сожалению никак найти не могу, нет схемы. В одном месте (не здесь) видел схему, где на TX/RX ногах стоят 2 резистора, оба по 510 Ом. В приведенной выше схеме кстати вообще никаких резисторов нет. Сначала подумал, что возможно так и у меня, но на конкретно моей плате на RX точно нет резистора, мультиметром сопротивление замерил, от разъёма до 21-ой ноги (RX по даташиту). А вот в цепи TX что-то стояло
Ну раз на RX ничего нет, либо косяк китайцев, либо тогда и с TX можно не париться.
Спасибо! В крайнем случае куплю новый модуль. всё равно уже едет из Китая ublox 7, вроде он получше. Вот кстати схема, где есть токоограничивающие резисторы в TX/RX http://geekistuff.blogspot.ru/2014/06/advance-u-blox-neo-6m-gps-module.html
У меня Ublox NEO-6M. заливал конфиг через АРМ, предварительно изменил в среде Аурдино скорость порта. Скорость порта я изменил АРМа или Ublox? после всех процедур спустя 3 часа под открытым небом так и не получилось поймать спутники. К тому же АРМ пишет «Bad GPS Health». Подскажите где капать?
Скорость изменили для подключения Arduino к модулю. А скорость работы модуля задается конфигом. Что пишет u-center с включенным debug? Там спутники видно?
Вот тут написано:
»
How to set the Baud rate?
1. Select View->Messages View, and then a window will pop out. Select UBX->CFG(Config)->PRT(Ports)
2. Set a new Baud rate in the option Baudrate
3. Click the button Send to transmit the command to the GPS module. Now, the Baud rate is modified to the new setting.
«
Всем привет! Собираю потихоньку квадрокоптер. Модуль гпс модуль еще не прошивал. Столкнулся со следующей проблемой: с модуля поступают неверные данные о высоте. В планере значения с apm — 70 см, а с модуля 143 метра 🙁 В чем может быть причина и поможет ли перепрошивка.
Модуль необходимо настроить (залить файл конфигурации). APM по баро показывает относительную высоту (т.е. нулем считается то, где включили плату), а GPS абсолютную относительно уровня моря. Поэтому такие числа. Это нормально.
Приобрёл на Али Экспресс недавно за сумму около 50-ти американских енотов.
GPS-приёмник ublox neo-m8n для Pixhawk (и как было написано у продавца — для APM). У меня же — модуль APM 2.6.
Во-первых, пришлось перенести один пин в правую сторону, поскольку разъём приёмника — 6-пиновый, а на GPS-разъёме APM — 5 пин. Вскрытие самого модуля GPS с целью выяснения распиновки разъёма эффекта не дало — на плате приёмника они не обозначены вообще, присутствует только маркировка элементов.
Подключение к APM велось в соответствии с цветовой маркировкой проводников, идущих от разъёма приемника к APM, а точнее — кроме переноса проводника черного цвета на один пин вправо (в сторону проводника красного цвета+5В) и укорачивание самого разъёма приёмника на этот же один пин с помощью лезвия — с целью воткнуть его в APM, что в результате и было сделано.
После подачи питания на APM по USB модуль весело засветился зелёным цветом, что для начала-порадовало. Далее хотелось выяснить, выполняет ли приёмник свои функции по предназначению, имея в виду то обстоятельство. что на плате приёмника при осмотре было установлено наличие ещё одного светодиода — синего свечения, индицирующего наличие захвата спутников и функционирование в режиме 3DFIX.
Я живу на перовм этаже пятиэтажного дома, балкон — зарешёчен, рядом от моего дома на дистанции 30 метров — соседний пятиэтажный дом аналогичной постройки и приличное количество распускающихся деревьев, что делало задачу нормального функционирования приёмника маловероятной. Однако после вынесения приёмника сантиметров на 10-15 за пределы решётки, закрывающей балкон минуты через полторы на правом борту приёмника весело включился и замигал синий светодиод, подтверждающий 3D FIX. Запуск Mission planer и последующее подключение к нему APM мои предположения подтвердили, координаты и точка моего местонахождения были означены на карте с точностью, достойной всяческого уважения — учитывая место и условия расположения приёмника.
Дальнейшая заливка файла конфигурации в приёмник в U-center через APM после установки на последний кастомной прошивки оказалось делом несложным и быстрым.
Хотелось бы отметить следующие моменты:
— модуль оказался на редкость -беспроблемный, весьма точный и обладающий высокой чувствительностью.
— При заливке файла конфигурации в приёмник необходимо установить скорость порта в программе U-center, равную 38400, установить соединение на этой скорости и обязательно добиться чтобы приёмник увидел спутники и начал выдавать навигационную информацию. после этого заливка конфигурации с сайта APM не вызовет никакой проблематики.
Программа U-center является инструментом, позволяющим проводить практически ЛЮБЫЕ настройки самого модуля GPS. Если с ней хорошо разобраться. При установлении прошивки с сайта APM просмотрщиком конфигурации в U-center следует убедиться в том, что установлены — порт, скорость порта, скорость выдачи навигационной информации, а также — включение бинарного протокола UBX и отключение протокола NMEA выдачи навигационных данных. Хочу повторить, что внимательное изучение программы U-center позволит Вам конфигурировать приёмники UBLOX вручную, добиваясь максимально эффективной работы с APM.
Удачи Вам!
Андрей, спасибо за отличный пост! Чувствую, ваши знания будут полезны всем, если распишите что и как настраивали в конфигураторе. Особенно интересно про прошивку, какой файл конфигурации был залит и что настраивали еще?
Прошу отписаться на форуме в существующей теме «GPS Ublox M8N и всё, что с ним связано».
Практические моменты при выборе GPS — приёмника.
Доброго всем времени суток!
Описывая настройки gps-приёмника на базе ublox neo-m8n (и всё что с ними связано) возникают следующие наблюдения:
— как и в случае со всеми жизненными ситуациями, при комплектации Вашей конструкции приёмником GPS имеет место извечно актуальная проблема …выбора.
Дело в том, что на форумах и в постах присутствует мнения многих пользователей приёмников подобного рода, выбор которых, мягко говоря, для них самих же не является однозначным очевидным. Я постараюсь пояснить эти строчки. С моей точки зрения, при выборе GPS- приёмника имеет смысл руководствоваться следующим:
— производитель набора микросхемe приёмника должен быть достаточно известным в своей среде и иметь (для начала) положительные отзывы об использовании своих изделий.
-Далее — на сайте производителя для удобства и работы специалистов и рядовых пользователей должна иметься исчерпывающая соответствующая документация.
— также на сайте производителя обязательно должны быть программный инструментарий, позволяющий пользователю комфортно работать с выбранным изделием данного производителя.
При выборе навигационного приёмника Вы должны понимать, что, рекламируя свои новинки, производитель тем самым демонстрирует свою последовательность в данном направлении и желание выпустить модель, учитывающую недостатки предыдущей и стремление к совершенствованию.
С моей точки зрения, изделия UBLOX этим критериям вполне соответствуют. Это -европейский производитель и один из лидеров в данном направлении. Он обладает и серьёзным качественным производственным потенциалом и необходимой программной и прочей поддержкой своих изделий.
Далее идёт более приземлённая сторона вопроса. Всё дело в том, что подавляющее большинство GPS-приёмников из этих наборов микросхем собирается в широко известной нам стране и тайны из этого мы давно уже не делаем, поскольку сей факт нас вполне устраивает. То есть, как говорит мой родственник, периодически бывающий в местах производства этой электроники: -… кока-кола в баре может быть и американской, а вот лёд в ней — из ближайшего к бару канала рисового чека. С последующими выводами… Что следует из написанного мной? Перед покупкой приёмника внимательно собирайте статистику по отзывам на сайтах продавца, и на форумах.
Не жалейте 300 рублей на покупку дешевенького китайского цифрового мультиметра, небольшой отвертки и ресурсов терпения в 15 минут на исследования внутренностей приобретённого Вами GPS-приёмника на предмет наличия контакта от разъёма модуля на плате приёмника до разъема, предназначенного для включение в рейс-контроллер. Даже если Вы хронически не ладите с электроникой, всё не так уж сложно:
На одном из разъёмов будут чёрный и красный провода — это земля (GND) и плюс +. Напряжение питания — соответственно. Между ними — оставшаяся пара RX — TX, которые, в случае нежелания приёмника дружить с рейс-контроллером при выборе порта и установлении его скорости в 38400 бит, всегда возможно с поменять местами с помощью пинцета и иголки. Оставшиеся два проводка на отдельном разъеме, как Вы догадываетесь, — это I2C — интерфейс компаса. После того, как рейс -контроллер увидел Ваш приёмник, постарайтесь путём несложных манипуляций подключиться к программе U-center и с помощью просмотрщика уяснить состояние основных настроек приёмника. Возможно, после этого заливать файл конфигурации Вам не понадобится.
Многочисленные диспуты на тему работы одновременной GPS-приёмника с несколькими навигационными группировками вызывают у меня некоторый интерес, но не более того. Мой ublox neo-m8n декларирует готовность видеть практически ВСЕ существующие навигационные группировки,(и видит их) но выдаёт навигационные данные пока только по сигналам GPS в протоколе UBX.
Хочется в этой связи отметить отдельно, что в случае для Ublox конфигурация модуля в программе U-center позволяет осуществлять конфигурацию рабочих протоколов приёмника раздельно и на приём, и на выдачу навигационных данных- соответственно. (Задумайтесь на досуге — зачем?)
В случае необъяснимой тяги к экспериментам по одновременному приёму сигналов двух и более навигационных спутниковых группировок с моей точки зрения, более предпочтительна платформа Pixhawk, позволяющая корректно практически подключить два навигационных приёмника к одному рейс-контроллеру. А с особенностями их совместной работы Вам придётся разбираться…, но скорее всего — уже самостоятельно…
В качестве практического наблюдения имею возможность сообщить, что приём сигналов в разное время суток даёт реально различные результаты. Приём в вечернее и тёмное время суток, даже в условиях плотной облачности — более уверенный. Во всяком случае для выбранной мной модели приёмника ublox neo-m8n.
Андрей ответьте плиз, о какой прошивке у вас идет речь?
Файл конфига для приёмника GPS — файл 3DR-Ublox.txt, а также кастомная прошивка для APM — файл GPS_UBLOX_passthrough_APM2.hex — для работы в программе U-ctnter через
APM взяты с сайта APM.
https://www.youtube.com/watch?v=zV3inGauUec -это видеоролик с процедурой конфигурации GPS — приёмника через APM без использования дополнительного FTDI -переходника,
который выложен в сети задолго до меня.
http://ru.aliexpress.com/item/NEW-High-Precision-Ublox-NEO-M8N-GPS-with-Built-in-Compass-for-PIX4-PX4-batter-than/32302021210.html -это ссылка на GPS-приёмник, который я приобрёл
на Али Экспресс.
А через FTDI эту прошивку шить можно? У меня похоже точно такойже модуль. Но упорно отказывается летать после кривой настройки :(.
—
Ой в смысле я так понял вы прошивали модуль GPS, нет?
Если Ваш вопрос касается GPS -приёмника линейки Ublox, то в него можно залить указанный мной файл конфигурации с сайта APM через указанный Вами FTDI-переходник. Хочу повторить, что перед заливкой конфигурации Вам необходимо в приложении U-center обязательно указать тип модуля (генерации M8 — как Вы упомянули), затем убедиться в наличии навигационной информации, а после этого выполнить процедуру заливки нового конфига. Если ничего не помогает, было бы верно выполнить сброс настроек к дефолтным.
Matvey!
Возможно, у Вас проблемы или с самим переходником FTDI, или с драйверами для него. Если заливка конфигурации через переходник не даёт эффекта, сделайте попытку залить конфиг через APM, как показано в ролике, ссылку на который я выложил выше. Это совершенно безопасно и несложно. Если не получается и таким образом, то проверьте все контакты от приёмника до модуля и конфигурируйте приёмник вручную по каждому пункту.
Также после заливки нового конфига желательно убедиться в нормальном приёме навигационных данных в программе U-center. Делать это рекомендую для того, чтобы убедиться в том, что модуль питания приёмника не даёт помех на работу GPS (на приём навигационных данных) во время работы квадрокоптера. Такая вероятность тоже присутствует.
Спасибо за ваши комментарии. Кажется когда я заливал настройки, то проигнорировал, то что в левой части окна у меня не было данных о текущих настройках, а также было множество ошибок. Возможно, настройки, которые я вливаю уже который раз просто на просто не применяются на модуле. Буду пробовать еще раз.
Не получилось.
1. При заливке через APM или через FTDI 3dr настроек, спуники «видны» списком, но как это сказать данные от них не поступают. Ждал долго — ничего. При возврате на полетную прошивку APM, также спутников 0 и no fix.
2. При залитии конфигурации для m8n, работает бодро, но ловит 4-6 спутников (ftdi). При подключении к APM тоже все печально минут 5 ловятся 3-5 спутников, но No fix. Собственно ждал долго — бестолку Ж(
MTK 3333 показывает 19 спутников, блин сволочь. В нем нет компаса и не очень он симпатичный (еще и без корпуса)
Matvey!
Вы пытались делать для приёмника m8n сброс настроек к дефолтным? Я не имею ни малейшего понятия, какие настройки или файл какой конфигурации Вы в него заливаете, это -раз.
Какими средствами проводить конфиг приёмника -совершенно не принципиально. главное, увидеть работу индикаторного светодиода о 3D FIX, если спутники видны и поступает навигационная информация в U-сеnter, то приёмник будет работать и через MP и показывать Ваше местоположение на карте.
Имеет смысл проверить контакт в приёмнике электрический контакт с антенной на плате и поставить фильтр для питания в APM.
Да, Matvey!
Извините меня за невнимательность. Если Ваш M8N видит спутники списком и не выдаёт навигацию — это уже пол-беды. Это -неверный конфиг приёмника, только и всего. Я попытаюсь вспомнить, как делать скринсэйвы с экрана и постараюсь сбросить Вам их в мэйл, чтобы Вы посмотрели на мои настройки и сделали попытку вручную поставить то же самое.
Что-то мне подсказывает о том, что оба протокола у Вас пытаются работать одновременно. NMEA надо отключить и частоту обновления навигационных данных установить не более 5 герц. Да, мэйл свой укажите, плиз…
Андрей! спасибо Вам за внимание. Кнопки ответ нету. Вот мое мыло nighthood@gmail.com
Ребят, потом поделитесь со всеми на форуме.
Matvey!
Сегодня я пробовал вывести из строя свой ublox neo M8N. Как только мог. Делал кривые настройки, заливал ошибочный конфиг и делал заливку конфига с ошибкой, после чего спутники не виделись ВООБЩЕ. В общем, уже с облегчением собрался расстаться с приёмником. Но! Включение режима сброса настроек в дефолтные ДАЁТ ВОЗРОЖДЕНИЕ ресивера и ЗАДЕЙСТВОВАНИЕ САМЫХ ОПТИМАЛЬНЫХ НАСТРОЕК, включая протокол UBX,порт, скорость, ну и кучу всего по пути, что в результате недолгого ожидания опять даёт устойчивой приём шести спутников GPS и одного ГЛОНАСС с устойчивым 3D FIX -ом в моих практически нереальных условиях приёма. Но эти все манипуляции я проводил НЕ ЧЕРЕЗ ПЕРЕХОДНИК, а ЧЕРЕЗ APM. Так что скриншоты вроде бы уже — и ни к чему. БЕЗ FTDI — переходника!!!
и мне можно фото пожалуйста!! ? uraxi@rambler.ru
Вставлю свои пять вымученных копеек по результатам борьбы сразу с двумя модулями (m6neo, m8n)
Критичное:
втыкать сначала gps в ftdi-модуль, потом его в комп, и только потом запускать u-centre.
Завершив работу в программе, обязательно делать дисконнект там, закрывать программу, вытыкать модуль
Иначе жёсткий BSOD IRQL_LESS_OR_EQUAL
Самое плохое, что можно попасть в цикл, когда после синего экрана любое втыкание модуля приводит к BSOD
Лечится так: с чистой загрузки открыть программу u-centre, только потом воткнуть модуль и пытаться коннектиться. Вряд ли в списке появится COM-порт, но и не выкинет BSOD. Закрыть-открыть программу и всё работает.
проблема известная, в гугле ищется, на своём самсунге вкусил сполна.
Или покупать оригинальные модули;)
Производитель, кстати, об ошибке знает и злорадствует по поводу китая.
По существу
1. Лично мне приведённый файл конфига всё всегда портил: включал одновременно NMEA+UBLOX, частоту обновления делал такой высокой, что на мгновения пропадали спутники (то есть, циклическое выпадание) и прочая и прочая.
2.UBLOX фигня. на дешёвых m6neo он вообще нестабилен, а вот на m8n…..я умудрился подобрать параметры так, что фикс был вообще без прерываний, в мишн планнере hdop был 1.4 — да только коптер при переходе в LOITER ничтоже сумняшеся куда-то устремлялся. Куда — не знаю. но далеко.
Включение только NMEA подобное поведене пресекает на корню: коптер висит там, где его оставили.
3. Где-то встречал, что на 3.2.1 NMEA уже не работает.
Всё прекрасно работает
(впрочем, может, это я что-то не так прочёл)
4. Про baud rate
Вообще, на сайте апм сказано, что он поддерживает всё до 115420 (что-то вроде)
по крайней мере, апм ТОЧНО воспринимает частоту 9600
5. Выбор частоты обновления прямо пропорционален baud rate.
Если правильно подобрать оба параметра, фикс будет непрерывный даже с высокой частотой
Сейчас у меня частота 4Гц (250мс) и всё отлично на m8n с выходом NMEA и baud rate 38400
6. все остальные настройки — весьмаааааа условно влияют на точность. Выбор режима «пешеход» — решение спорное, но статистически — чууууть лучший конечный результат. Почти плацебо.
Это всё мой личный опыт, который, надеюсь, кому-нибудь сэкономит кучу времени.
единственное, я бы очень просил указать в шапке на возможность использования дефолтного конфига.
«Завершив работу в программе, обязательно делать дисконнект там, закрывать программу, вытыкать модуль
Иначе жёсткий BSOD IRQL_LESS_OR_EQUAL» — это проблема Вашей винды или комьпютера. Хотя, последовательность действий абсолютно разумная. Неужели кто-то на горячую отключает GPS модуль от FTDI? На моем компьютере нет разницы, что сначала сделать: подключить FTDI, или запустить u-center. В любом случае, спасибо, что поделились опытом, кому-нибудь с такими же проблемами винды/компа пригодится.
1. Да, тоже иногда такое бывало.
2. Мой Neo 6 обычно держит позицию отлично, то есть не носит его. Не прибитый конечно в точке, но в сфере 1-2 метра точно держится. Один раз было при сплошной облачности: HDOP > 2.5, сильный ветер, в лоитере полный неадекват — коптер неуправляемый, летит сам куда не не надо.
3. Все пишут, что в 3.2 NMEA нет. Люди специально компилируют кастомные прошивки с NMEA.
4. Насколько я понял исходники крайней версии APM, полётный контроллер сам устанавливает все настройки от скорости порта и частоты обновления до режима Airborne и SBAS: https://github.com/diydrones/ardupilot/blob/master/libraries/AP_GPS/AP_GPS_UBLOX.cpp#L651
Интересно. Имею 3 модуля Neo 6m, на 3х компах такого не встречал, как бы их не тыкал и не вытыкал. Если у кого так же, то думаю эта последовательность поможет и будет полезна!
По текущему файлу помнятся некоторые косяки, а вот по файлу из архива жалоб не слышал. Если разбираетесь хорошо в конфиге, то сравните плз.
Думаю рано. Когда наберется статистика хотя бы по пяти экземплярам одной/каждой модели модуля, тогда и включать в тему.
Доброго времени дня!
Попытаюсь написать короткое резюме по поводу прочитанного и написанного:
— Во- первых, на одном и том же наборе микросхем одного производителя GPS – ресиверы собираются почему-то СОВСЕМ НЕ ОДИНАКОВЫЕ…
— Обобщать по поводу изделий Ublox я не собираюсь в принципе, как минимум по одной причине, которую указал пунктом выше. Но считаю, что если в линейке этого производителя появился ресивер генерации M8, то выпуск этого изделия не обусловлен исключительно переводом производственных мощностей на новый техпроцесс для снижения энергопотребления в целях последующего увеличения времени автономной работы. Однозначно присутствуют и другие — более важные конструктивные особенности, – но это вовсе не означает, что эти самые особенности ДЛЯ Вас будут и наглядны и очевидны…
— Протокол NMEA – никогда не был абсолютным злом (во всяком случае я этого не писал). Но включенный одновременно с UBX доставит Вам не мало вопросов перед тем, как ваш коптер научиться держать фиксированную GPS – позицию. В программе U-center имеется на этот случай соответствующий пункт, позволяющий ресиверу адекватно воспринимать как один и другой протокол (или же оба — совместно) поступающие на вход ресивера, так и с лёгкостью выбирать тот из них, который представляется Вам наиболее актуальным для дальнейшего применения.
— Если сам APM имеет все легальные частоты работы шины, которые указываются в выборе возле доступного Вам порта, то ресивер имеет значения, хранящиеся в его настройках ПО УМОЛЧАНИЮ (9600) или же ВЫБИРАЕМЫЕ ВАМИ и устанавливаемые как РАБОЧИЕ из тех, которые будут функциональны при его подключении к APM. Автовыбор частоты не всегда работает корректно и об этом уже неоднократно упоминалось.
Подключение и конфигурация ресивера через FTDI – переходник имеет свои особенности и может (после переподключения сконфигурированного приёмника к APM) Вас удивить, а что ещё более вероятно – озадачить.
“Выбор частоты обновления прямо пропорционален baud rate.” Вывод мной комментироваться не будет. Считаю что было бы уместным предположить, что в случае с NEO M8N частота обновления актуальна НЕ ТОЛЬКО ДЛЯ ОПТИМАЛЬНОЙ РАБОТЫ С APM. Если есть желание разобраться с настройками и протоколами – сохраните Ваши текущие настройки в файл, сбросьте настройки ресивера в дефолтные и попытайтесь проанализировать просмотрщиком конфигурации состояние этих настроек.
В качестве дополнения хочу напомнить один из комментариев, смысл которого заключался в том, что APM вполне удачно взаимодействует с приёмником, над которым не производилось ВООБЩЕ НИКАКИХ МАНИПУЛЯЦИЙ по его конфигурированию. И коптер практически держит позицию в соответствующем режиме. Кстати. Речь шла о приёмнике Ublox генерации M8…
Хочу отметить, что я в коптероводстве недавно, а уж с GPS вообще никогда никак связан не был совсем. Так что всё, что я здесь пишу — исключительно личный опыт (и некоторое количество гугления)
Отвечу всем — и, надеюсь, надолго для себя закрою тему)
*у меня 3.2.1 — но, наверное, не суть*
1.
Вот, собственно, я так же думал.
пока не получил по недосмотру м8н БЕЗ ЕЕПРОМ, жёстко сконфигурированный на NMEA 9800. И коптер — висел в точке! а значит, либо верно Ваше понимание того, что APM полностью конфигурирует ublox, вплоть до протоколов — либо….мозги понимают NMEA
в пользу своей точки зрения добавлю, что сейчас у меня нормальный м8н сконфигурирован на вывод Ublox+NMEA (дефолтная установка), но я добился, что в u-centre отображается стабильный NMEA без прерываний на UBX.
И, опять же, когда у меня был сконфигурирован вывод только UBX, коптер улетал в Россию.
Насколько я понимаю, всё это вкупе свидетельствует о том, что всё же коптер опирается на NMEA
Или же включение дополнительно NMEA как-то влияет на восприятие коптером UBX…но это за гранью моего понимания.
2. SBAS, кстати, по мнению некоторых, негативно влияет на точность (и барометр)
Точность — да, барометр — не знаю. Но сейчас заметил, что коптер иногда необъяснимо теряет высоту на метр, а потом возвращается. Может, вы и правы с преконфигурацией апм……
3.
. нет-нет, и я так тоже не считаю.
Я лишь заметил, что повышение частоты обновления при неизменно низкой скорости порта — в какой-то момент приводит к пропускам пакетов — или, даже, регулярному выпадению спутников на долю секунды.
В связи с чем, рекомендую обратить на это внимание тем, кто будет играть с частотой обновления.
Мне это наблюдение позволило получить 4ГЦ и стабильный поток пакетов без прерывания. Всё.
Если честно, я по горло сыт мучениями с GPS вместо полётов, — так что, думаю, флаг будет нести кто-то другой.
*а вот по поводу сохранения настроек, буду признателен
Потому как у меня при выборе Save GNSS вечно вылезали таймауты по ВСЕМ параметрам. Или по части.
А action — save config — я так и не понял, работает ли — и если да, то куда сохраняет.
В общем, мой главный вывод для тех, у кого GPS не работает, как надо/ожидалось: просто сделайте сброс на дефолтный конфиг. Если летает — радуйтесь так, и не тратьте время на заумную возню с настройками.
И, разумеется, не забывайте сравнить с конфигом из архива (который вы уже, конечно, попробовали)
Обращаю внимание, что конфиг из архива — для Neo6m. Верно, для других надо ставнивать.
Доброго времени дня. Илья!
Вы в своих изысканиях совсем даже не одиноки. Я по диплому – метролог, системы навигации и точного времени мне в ВУЗе мне читали просто ознакомительно. Денег на покупку оригинальных изделий – как самого контроллера, так и ресивера – нет и желание искать оригиналы –тоже отсутствует. Исходя из вышеизложенного в имеющимся уравнении неизвестным является ВСЁ, включая и результат, что в качестве решения реальным представляет ТОЛЬКО ЭКСПЕРИМЕНТ.
Я всего лишь скромно могу предположить, что GPS –ресиверы могут быть медийными, содержащими вычислительные мощности для построения отдельного функционального устройства типа навигатора, встроенными в чипсет, например — типа смартфонного SOC – (как в случае моей Нубии z5s-mini, которая по части функционирования встроенного навигатора имеет вполне заслуженные отзывы одного из лучших встроенных навигаторов в своём классе), ну и просто ресиверы как таковые, разумеется – с достаточно развитым встроенным интерфейсом.
Последние имеют вообще широкое применение. Модели от Ublox имеют однозначно двойное назначение (то есть могут применяться и в военных целях- тоже, в системах управления и наведения высокоточного оружия) — о чём говорят их характеристики в части максимальной перегрузки по числу G и максимальным значениям скорости и высоты: -они явно искусственно занижены, чтобы не допустить соблазна применения этих чипов в оборонке. Тем не менее, сам по себе этот факт говорит по большей части — в пользу достоинств данных изделий, как таковых.
Шестые модели от Ublox–ов одназначно удачными и стабильным назвать можно лишь с очень большой натяжкой, седьмые мало кто юзал (и на данный момент она уже точно устарела, точнее – ее приобретение не имеет смысла как такового), а восьмые вообще– редко кто берёт в силу того, что модель медленно дешевеет и имеет ценник около 45 долларов.
В случае с купленным мной ресивером NEO M8N я не только не знаю имени производителя ресивера, но и не могу выяснить распиновку разъёма на его плате – потому что все залито взглядо- и светонепроницаемым чёрным лаком. Приблизительно то же самое – с моим APM. Мне его продали как версию 2.6 (за 34 доллара), он ДАЖЕ позволил (и на том -хвала Господу!) корректно сделать прошивку энкодера и периодически заливать коптерную и кастомные прошивки и на первый взгляд – адекватно на них функционировать. Какой протокол работы с GPS в нём используется – разберусь по ходу дела, принимая во внимание то обстоятельство, что их всего два. Но если используемый по умолчанию в ресивере бинарный UBX уже настроен, то в NMEA — куча всяких параметров, с которыми ещё придётся основательно повозиться, перед тем как его задействовать.
В принципе же – виновником всех бед является не протокол как таковой, а незнание его особенностей как минимум или же незнание в принципе того, с чем имеешь дело в случае с конкретным экземпляром ресивера или контролера APM.
При покупке же этих устройств даже в Интернет –магазине всегда можно найти и отзывы, и характеристики самих устройств. А иногда – и их начинку на фото…
А в придачу ко всему –производители упомянутых выше изделий – и GPS -ресивера и APM – тоже не первый год -но всё тоже -хороши:
— сделать на имеющемся ресивере для самого GPS – интерфейс стандарта I2C, а на плате APM – второй двухпиновый разъём для этого интерфейса, чтобы народ не парился с иголками, меняя проводники RX с TX, и забыть о проблеме с синхронизацией шины и данных –так у производителей на это не хватает, судя по всему, просто- фантазии…
Кстати, насчёт частот работы порта и GPS – ресивера. На заре появления компьютерных материнских плат, в которых был задействован асинхронный режим работы памяти и шины данных, такая же проблема тоже имела место. В последствии она была быстро и недорого решена. То есть либо частоты данных и работы контроллера должны быть РАВНЫМИ или КРАТНЫМИ, либо придётся использовать аппаратно-программные решения, например, дополнительную буферизацию, только и всего…
Насчёт параметра RATE (в gps NEO M8N) -к сожалению, относится к тому, что я написал в посте ранее. Это –неочевидный параметр, он в придачу ко всему имеет отношение к режиму функционирования с двумя группировками одновременно (возможно -неточно). Где-то информацию видел, но кажется, опять – всего лишь в посте, а не в разделе документации.
Благодарю за развёрнутый ответ!
кстати, интересно, где вы брали этот модуль? 45$ — выходит, веьма дёшево, потому как свой модуль я брал напрямую на его родине, и ничего сверху за доставку не платил. Но, надо сказать, у меня модель продвинутая, с еепром. Стоило 340 юаней, что в переводе на рубли даже чуть больше вашего. и вообще, какие-то подозрительно вкусные у вас цены были….
Да, про оборонку вы тоже правы: точность нашего модуля аж в 15 раз превышает возможности ярса. что представляется мне отличным способом поднять самооценку коптеростроителя.
Я покупал на Али экспресс.
Эта цена и полтора месяца назад не была самой маленькой, были модели на neo M8N и ощутимо дешевле, но я побоялся экономить три бакса на хорошей покупке.
http://ru.aliexpress.com/item/NEW-High-Precision-Ublox-NEO-M8N-GPS-with-Built-in-Compass-for-PIX4-PX4-batter-than/32302021210.html -это ссылка на GPS-приёмник, который я приобрёл
на Али Экспресс.
Сейчас там же можно найти долларов за сорок.
Насчёт Ярсов — не всё так однозначно. Ему при подлёте к цели во-первых. надо в принципе самосохраниться, а уже потом реализовать с достаточной точностью имеющийся у него потенциал. Это -две совершенно разные задачи, учитывая то обстоятельство, что данный носитель — всё лишь модернизированная линейка Тополя, а это означает, что втиснуть в вес около 45 тонн всё что пожелаешь -не получится в принципе. Так или иначе чем-то придётся пожертвовать…
http://ru.aliexpress.com/item/Ublox-NEO-M8N-High-Precision-GPS-Built-in-Compass-w-Stand-Holder-for-AMP2-6-2/32355376979.html
Это — ссылка на ресивер с ценником около 2100 российских рублей. Дешевеют ресиверы, даже несмотря на скачки курса доллара.
На banggood.com есть модуль NEO M8N за 17,82, правда он без «защиты»:)/
Привет нужна помощь, коптер СГП видит, но при включении режимов с использованием СГП уходит во все стороны (без СГП всё хорошо работает замечательно) проверял 2 модуля СГП прошивал 2 раза мозги прошивкой на которой ещё год назад работало всё супер
Похоже проблема с компасом. Либо вы его неправильно расположили (если внешний), либо надо выполнить калибровку акселерометра, а затем калибровку компаса в поле, чтобы не было внешних влияний.
альт холд держит норм а вот лойтер в одну из сторон с увеличивающимся углом наклоняется
Доброго времени дня!
Неоднократно вижу высказывания о том, что летательный аппарат имеет один из режимов полёта с удержанием позиции данным навигационного приёмника. В данной ситуации самым интересным является то обстоятельство, что точность позиционирования современных навигационных систем составляет около пяти метров на местности. Да, существуют прецизионные режимы в GPS, но они недоступны рядовому пользователю, предназначены для боевого применения и в принципе – в отличии от гражданского GPS, кодированы – то есть весьма прилично зашифрованы. В придачу ко всему такие прецизионные режимы работы (в GPS) требуют связи с базовой станцией.
Точность в 5 метров же навигации гражданского применения складывается из целой кучи факторов, которые просто нет смысла упоминать все и подробно: — тут и погрешности распространения сигналов в атмосфере, конечные значения погрешностей стандартов частоты, находящихся на спутниках, и кстати – даже модели земной поверхности в GPS и в российской ГЛОНАСС –тоже разные. Американцы используют свою (национальную) модель, а в России используется так называемый геоид Красовского.
Я это пишу к тому, что если действительно в режиме удержания позиции применять только данные навигационного приёмника, то конечный результат будет вполне очевидно -не для слабонервных. Пятиметровые рывки и т.п.
Это все с учетом того самого обстоятельства, что ресурсы APM не позволяют практически применять сколь либо серьёзную математическую обработку навигационных данных, хотя бы по типу фильтрации Калмана. По крайней мере –сейчас. Ну а в будущем у APM шансов становится всё меньше – потому что разрядность данных, получаемых от датчиков последнего поколения неумолимо стремится к 32-м битам, и если для работы программы по фильтрации Калмана не хватает свободной памяти APM, то для обработки 32-битных данных скоро не будет хватать производительности. То есть скорости.
Вывод напрашивается сам собой: каждый полётный контроллер хорош для своего применения. Учитывая его ценовой диапазон.
Помогите решить проблему! прошил файл конфигурации. В меню TP выставил ка надо, но индикатор не горит, хотя спутники захватывает. У меня Neo 6m
Скорее всего не настроен TimePulse — писали об этом выше
Не могу прошить. Пробовал кучу раз. Сначала способом как у Юлиана. В итоге ЖПС не виделось в Ублоксе. Попробовал через МиссионПлэнер — все равно не видит. Что делать?
Вот картинка: http://hkar.ru/Cl6t
У вас GPS 5ого поколения? (справа от окошка выделенного зеленым) Попробуйте указать в меню что у вас 6ой 7ой или 8ой юблокс
А debug включен?
Модуль Ublox neo-6m
Какой должен быть Rate? По умолчанию 1Гц, поднимаю до 5 — у модуля срывает крышу. HDOP 2-8, APM орет то Bad GPS Health то Hight HDOP то еще что-то..
и какая должна быть скорость порта?
Может все по дефолту сделать?
А еще такой вопрос — в Ublox центре у меня дофига спутников и HDOP 1.1 — 1.8\ но когда я отключаю его и проверяю в АПМ — там до 8 спутников и HDOP 18.8 — 2 и более
Имеется вот такой модуль neo 7 фото1 фото2. Вообще есть еще и neo6 и neo8, этот «запасной». Как ни странно, работает без каких-либо настроек из коробки, только настройки у него кривые (это выяснилось при подключении в u-center — не отключен NMEA, RATE установлен как 1000ms / 1Hz, скорость подключения 9600). Настройки из файла 3DR-Ublox.txt грузятся, но только проблема в том, что они не сохраняются после отключения питания (видимо во флеше). Попытки настройки нужных параметров вручную через configuration view в u-center также к успеху не привели, после отключения питания все сбрасывается. С остальными модулями такой проблемы нет, все настраивается и сохраняется.
Глядя на фото можно сказать, у него вообще флеш есть на борту? Визуально отличается от 6m и тем более от neo8. У меня контроллер APM, но насколько я знаю, pixhawk при инициализации модуля gps сам настраивает все нужные параметры и танцы с бубном в u-center не нужны, в случае с APM так не получится ? Может есть умельцы запилить небольшой патч в прошивке?
Update. Нашел описание в магазине на алиэкспресс, где покупал. Там четко написано:
Parameters:
— Dimension: 50*50mm
— Weight: 0.08
— GPS module: u-blox NEO-7M
— EEPROM: no
— Connecting cable: molex 1.25mm-5pin/4pin
Default parameters:
— NMEA protocol
— Baud rate : 9600
— Nav rate : 1Hz
— TIMEPULSE (fix LED) rate : 1Hz
В общем, судя по всему с APM нормально использовать не получится?
На втором фото под модулем GPS есть площадка 8 контактов. Туда должна быть припаяна флешка.
Попробуйте почитать даташит, позволяет ли модуль хранить настройки и как-то может по другому надо настраивать, чтобы настройка была жесткой без флешки. А так же надо поискать информацию, не заблокирована ли сейчас там эта конфигурация.
Доброго времени дня! Я на днях возился со своими модулями телеметрии, пока не довёл до ума обновление прошивки на каждый из них в отдельности. Так что теперь практически разделяю высказанное мнение присутствующих на форуме о том, что драйвера под переходник USB-COM — это разговор для отдельной темы, особенно если этот самый мост выполнен не на оригинальном наборе микросхем (я имею в виду адаптер USB-COM на, уже известной нам по предыдущим статьям, микросхеме FT232RL.) Это — всего лишь вступление.
Если у Вас имеется работающий (поддерживающий соединение) набор из двух модулей телеметрии — (совершенно неважно, на какой частоте работают модули -лишь бы видели друг друга и соединялись)- то при наличии отдельного источника в 5 вольт Вы вполне можете подключить свой GPS — приёмник(модуль) к одному из модулей телеметрии точно также, как к адаптеру USB-COM.
Единственно, Вам понадобится отдельный источник стабилизированного напряжения на 5 Вольт с пиковым током нагрузки приблизительно 70 миллиампер и утилита 3DR Radio Configuration Utility, смотрите статью http://apmcopter.ru/apm/apm-setup/telemetriya-nastrojjka-modulejj.html, для соединения этих самых двух модулей (между собой по беспроводному радиоканалу, естественно). После правильного подключения GPS -приёмника к модулию Вы получаете возможность удалять GPS -приёмник метров на сто от своего компьютера (в пределах прямой видимости) и по беспроводному каналу осуществлять подключение навигационного приёмника к компьютеру и любые манипуляции с ним по его конфигурации и последующему использованию. В некоторых случаях это представляется весьма удобным, поскольку в условиях городской застройки не везде есть возможность увидеть синее небо с пятью-десятью GPS-GLONASS спутниками (при условии чего возможна заливка файла конфигурации) и последующая оценка практической его работоспособности, заливка альманаха и оценка точностных характеристик (хотя бы по параметру HDOP).
В некоторых случаях подключение по данному беспроводному способу безусловно представляет реальную альтернативу проводному подключению с использованием адаптера USB-COM на, уже известной нам по предыдущим статьям, микросхеме FT232RL. Я имею в виду те случаи, когда драйвера в системе не позволяют адаптеру USB-COM функционировать адекватно, или длины USB — кабели не хватает для того, чтобы приёмник увидел небо и получил минимально необходимую навигационную информацию.
Доброе время суток. Помогите пожалуста, приобрёл M8N на али вот такой: http://ru.aliexpress.com/item/Free-shipping-CJMCU-U-BLOX-M8N-NEO-M8N-0-001-GLONASS-Beidou-dual-mode-USB-GPS/32381416666.html
не могу установить на Windows 7. Устройство не устанавливается поскольку не видит дров 8-ой серии. при принудительной установке дров 7 версии и других код 10 — запуск устройства не возможен. Установка дров проходила без ошибок. не знаю куда копать…
Мне воооще -не разобрать, что что за зверь… Он что, USB?!
у меня USB
Да… Тяжела ты — шапка Мономаха….
А куда изволите этот шедевр втыкать, исключая вариант с компьютером?
Делаю pccar . комп в авто. Приобрел для навигации
Добрый день. После переустановки системы рессивер стал определятся как Silicon Labs CP210x USB to UART Bridge в портах. U-center показывает его и спутники. Подскажите невежде, как сделать чтобы его видели программы навигации?
Как в u-cente сбросить настройки на дефолтовые? Купил в общем Neo M8N http://ru.aliexpress.com/item/New-Arrival-Ublox-NEO-M8N-High-Precision-GPS-with-Built-in-Compass-for-Pixhawk-PX4-APM/32245591458.html подключил а АПМ 2.6. Ждал 20 минут ни одного спутника!!(( Снял и подключился через FT232. После 30 минут вроде 4 спутника пойма. НЕ пойму он моросит что ли(( Обычно в этом месте Neo 6 ловил 5 спутников.
Вообще надо ли заливать конфиг файл?
Спасибо!!
Меню Receiver — Action — Revert config.
Спасибо!!
поделитесь, какие настройки надо выставить в u-centre что модуль neo m8n нормально работал с апм 2.6
А вот по этой теме внятной информации увы нет. Только эксперименты… Советую взять конфиг от 6M, открыть окно, где меняются настройки, переписать все пункты, сделать сброс 8M и для него так же вручную изменить настройки согласно 6M. Сам это не делал, но некоторые пилоты так делают и все работает. У самого есть модуль для экспериментов, но с ним пока что-то другое.
В общем справился !! Сбросил на дефолт. Потом залил конфиг Marco-Ublox_M8N. Поставил скорость 38400 больше ни че не трогал и ура… на окне 9 спутников. А да, поставил время обновления 200 мс вместо 1000 мс.
Вот тут брал файл конфигурации https://github.com/diydrones/ardupilot/tree/master/libraries/AP_GPS/config
Замечательно! Спасибо за ссылку! Такого что-то не видел. А не в курсе, разработчик давно это сделал? А то там указано, что 8 дней файлу (возможно и крайнему изменению).
Привет. Честно говоря не в курсе! но после обновления начал сносно работать модуль! и скорость обновления поставил только 200 мс.
https://github.com/diydrones/ardupilot/tree/master/libraries/AP_GPS/config
ссылка больше не работает
для удобства:
https://github.com/diydrones/ardupilot/tree/master/libraries/AP_GPS
Я прошу прощения,но мне чуть не понятно. Чем новый 8N лучше старой, проверенной и отработанной 6-ки? Там что-то новое Поднебесная придумала? Может, я между строк просто читаю? Ни разу не стеб…
Доброго времени суток. Я приобрел APM 2.6 с GPS модулем NEO 6M(с магнитометром на борту). Все подключил, все настроил. В режиме баро летает отлично, а вот в режиме лоитер начинает гонять по кругу. Подключил GPS к компу, смотрю через U-Center. Координаты точки постоянно скачу (примерно в радиусе 10-15 метров) скорость перемещения показывает от 0.1 до 2 км/ч. Прошивал модуль стандартной прошивкой с сайта APM не помогло, играл с настройками модуля(Ports, Rates) все равно так же скачет. Подскажите пожалуйста скорость должна скакать при стоячем на месте модулем (если да то в каких пределах)? Что можно еще ему подкрутить чтобы координаты стали меньше плавать? Заранее спасибо.
По поводу M8N и стёба- мнения — различаются (как в принципе и должно быть у нормальных людей). Мой Ublox neo m8N -это изделие швейцарское, а вот GPS -ресивер, собранный на нём — производства Китай. При 8-10 видимых спутниках держит HDOP меньше 1,5 и не сильно напрягается. Народ его использует уже не первый день.
Андрей.
Понятно,спасибо.))
Видно, в Вашей местности спутники равномерно более-менее над Вами расположены.
Хотя у меня на 6-ке тоже бывали даже немного лучше показатели. Единичные случаи.
При 12-ти — 13-ти спутниках — 1,3-1,4.
Роман, я Вам отвечу так: в этих экспериментах (с моей точки зрения, разумеется) всё — очень условно. Какие значения HDOP, какой модуль их рисует и кто собирал на данном модуле сам приёмник (ресивер) GPS — потому что специалисты не ленятся собрать себе приёмник вручную. Народ уже, конечно же, натыкался и на кривую сборку, на отсутствие микросхем флэш-памяти, в которую записываются определённые параметры, на обрыв антенны и кучу всяких и разных нюансов. Кто -то утверждает, что именно его модуль работает с несколькими навигационными группировками ОДНОВРЕМЕННО. Лично я НИКОМУ НЕ ВОЗРАЖАЮ. Просто что каждый хочет сказать таким вот выражением -это -тоже большая загадка. Может — человек заявляет о том, что его модуль имеет В РАЗЫ повышенную точность по сравнению с односистемным ресивером. Или то, что время «Холодного» старта у него гораздо меньше односистемного приёмника. А может — просто сообщает факт того, что у него имеется свобода выбора системы. с которой ему предпочтительнее работать. В описании на мой приёмник NEO M8N и в его настройках прописаны свойства видеть все существующие навигационные спутниковые группировки. И количество каналов одновременного приёма у него — чуть меньше сотни. Однако сколько он видит в режиме холодного старта сателлитов — я не знаю, но в режиме 3d fix — как и полагается, из 24 спутников, находящихся на орбите, он видит для начала около десятка, и при увеличении высоты метров на двадцать — положенные 12 спутников, составляющие половину всей группировки, за исключением, естественно, неработающих резервных.
Mamik, доброго времени дня! Подскажите пожалуйста- вы заливали конфиг в восьмой ублокс по вашей ссылке в тексте или в коде? То есть — маленький файл или- стокилобайтовый текстовый?
я сказал файл и залил его!!
Mamik, доброго времени дня! Если только Вас не затруднит — не могли бы Вы сообщить размер (объём, вес — как больше подойдёт) -этого самого залитого Вами файла конфига. Просто мне хочется уточнить маленькую деталь.
102 кб. Но я советую сделать так! открыть фай по ссылке https://github.com/diydrones/ardupilot/tree/master/libraries/AP_GPS/config , далее создать блокнот и все скопировать туда!! Я ша точно не помню , но кажется залил не правильно! поэтому советую сделать так. а файл если его скачать весит 102 кб. При его открытии так не поймешь что)
И вообще если я замучился с эти модулем http://ru.aliexpress.com/item/New-Arrival-Ublox-NEO-M8N-High-Precision-GPS-with-Built-in-Compass-for-Pixhawk-PX4-APM/32245591458.html
Или мне глючный попался.
Вроде настройки не менял , но сейчас он нормально не работает. Может АПМ 2.6 не работает не могу понять!
Ставлю на окно и подключаю в мишен планер показывает 8 спутников и дроп 2. И соответственно fix 3d. Но после того как отключу кабель спутников больше нет. Вижу по телеметрии. На модуле моргает синий индикатор, что захватил спутники, однако на ОСД эта информация не отображается. В полете в режиме лоитер ведет себя, как будто модуля нет(летит куда по кайфу)
В программе U-center извинил скорость 38…. и скорость обновления 200 мс. (5Гц) вроде больше не менял! Попытка снова залить конф. файл не выходит ! Появляется окно слева нет данных, с права есть! При этом в момент попытки залить конф.файл горит 3 fix
Доброго времени дня, Mamik!
Вы правильно меня поняли. Раньше я пользовался текстовым файлом конфига весом около четырёх килобайт. Но содержание этого файла был -код. Новый файл конфига — как его не крути, занимает 100 килобайт. Внутри этого фала -текст. Тут уже начинаешь сомневаться — а хватит ли места в бортовой флэш-памяти приёмника GPS, если там стоит одномегабитная микросхема? И почему нет возможности скачать файл конфига в коде? Непонятно… Остаётся Ваш вариант -сделать копию кода в свой файл и попытаться его заплить.
Я ещё я хотел бы Вам напомнить, что заливка конфига проходит корректно лишь тогда, когда приёмник видит спутники.
да, я написал что в момент заливки горит 3D Fix
И не факт, что период 200 мс(5 герц) — это оптимально для АПМ. Я видел инфу, что владелец М8N увеличивал этот перио до 250 мс (4герца), чтобы не было выпадания данных.
попробую сегодня! Но вчера все моросило! не пойму от чего! В программе u сenter спутники то появлялись то пропадали. и так все время вчера было! Запарился лег спать!
Для чистоты эксперимента НЕПРЕМЕННО сбросьте все параметры в дефолт. Потом залейте новый файл конфига и подержите приёмник в зоне видимости спутников час -для пока не зальётся альманах. Скорость порта поставьте -38400, период -250. проверьте чтобы после заливки конфига по умолчанию встал протокол UBX. Всё хорошо, модуль очень-толковый, но требует настроек и внимания. Всё будет хорошо!
Вы конфиг заливаете через АПМ или через FTDI-переходник?
А, через переходник-вижу. Я могу дать Вам совет: — не особо напирайте на OSD, просто возьмите с собой ноутбук или смартфон на андроиде с установленным планнером и там убедитесь в значениях количества видимых спутников и HDOP — чтобы всё было без осечки.
Ну и — залейте корректно новый файл конфига перед этим. маленький файл — в коде — я имею в виду. Запросто может быть, что пины данных на разъеме GPS — хитаесь перепутал. Такое — не редкость. То есть — требует перепроверки.
Спасибо Андрей за совет! Конфиг первый раз залил через переходник. Потом устал возиться и все настройки начал делать через АПМ, предварительно прошив соответствующим файлом. В данный момент я не могу залить никакой конфиг. Выбираю файл нажимаю кнопку file.. появляется окно! В этом окне левая сторона пустая, правая с записями версии.
При попытке залит конфиг спутники видны!!
Кастомная прошивка АПМ как раз и хороша тем, что не приходится каждый раз издеваться над недолговечными разъёмами АПМ DF-13, выдёргивая и втыкая в них разъём GPS. А обратная сторона медали это как раз -то, что после кастомной прошивки АПМ надо заливать лётную прошивку и все настройки делать вручную. Особенно -калибровки…. Кстати, как Вы определились с фактом того, что конфиг загрузился и загрузился — удачно? Вы убедились в настройках — которые я приводил, которые должны видеться на приёмнике GPS после заливки конфига? А то в настройках GPS вылезет протокол NMEA, а по счастливому стечению обстоятельств прошивка коптера будет скомпиллирована под UBX, потом будут вопросы типа …. -почему коптер носит как непонять что и вообще нет данных GPS?!
Первый раз заливал конфиг через переходник!! Действительно разъем АПМ не хочется насиловать. А заливать прошивку на АПМ можно сохраненную ! Ну мне так сказали. Надо попробовать, так как очень удобно! все настройки сохраняются !
Первый раз заливал конфиг через переходник!! Действительно разъем АПМ не хочется насиловать. А заливать прошивку на АПМ можно сохраненную ! Ну мне так сказали. Надо попробовать, так как очень удобно! все настройки сохраняются !!!
Вообще в идеальном случае калибровку акселераторов и компаса нужно делать перед каждым полётом. Это будет гарантировать отсутствие настрое в ходе полётов с ошибками. У меня, например. две проблемы статические — неважно калиброван компас и высокий уровень вибраций.
Сегодня при 12 видимых спутниках имел место HDOP = 1,3 Это -неплохой результат. Разделаюсь с источниками повышенных вибраций -буду доводить до ума тонкие настройки GPS.
друзья добрый день! Прошу мне помочь. Хочу залить файл конфигурации в свой жпс приемник neo 6m. проблема такая. модуль находит спутники, но на нем вообще не загорается и не горит никакой индикатор. Вместе с этим в программе ю-центр он спутники не находит и не прошивается пробовал через контроллер прошивать и через юарт переходник. все одно — горит но фикс и спутники не определяются и прошивка не лезет(. куда копать? может приемник дохлый?
Алексей, а расскажите, как что делали. Какой адаптер USB-UART? Пробовали менять местами RX-TX, меняли скорость подключения? Соединение устанавливается? Разъемы/провода на прозвонку живы и правильно ли подключены?
адаптер — usb to ttl yp-02, пробовал подключать через АИОП со специальной прошивкой рх тх местами менял, скорость ставлю автоматическую, подключение вроде устанавливается,провода целы.
Подключение GPS модуля к микроконтроллеру, описание протокола работы http://radiolaba.ru/microcotrollers/gps-modul-podklyuchenie-k-mikrokontrolleru.html
Подскажите кто знает , порт определяется , коннектится, доложу до загрузки прошивки выскакивает ошибка и слева пусто , сбросил настройки , далее заливаю прошивку , и в конце программа выдает ошибку и сама программа закрываются что может быть
Именно прошиваете модуль? Или заливаете конфиг?
Программа закрываться не должна штатно, или она вылетает с критической ошибкой? Не удается разглядеть, что же пишет?
Не удается разглядеть что пишет
Может попробовать записать что происходит на экране?
У меня при коннекте в правом нижнем углу внизу где зеленый цвет должен быть , обозначающий успешное подсоединение модуля gps, то ксожалению этого не происходит , может в последней версии u-centre этого и не надо , а достаточно , чтобы вверху слева законнектился и все ? Может где надо выставить какие нибудь параметры ?
Думаю, что в версиях u-center вряд ли что различается в подключении. А на другом ПК пробовали/другой UART адаптер?
Нет на другом пк не пробовал и UART ксожалению у меня один , ладно буду думать и методом тыка пробовать
Прочитал не давно где-то в сети информацию о том, что в линейке третьих Фантомов используется Ublox neo M8N.
Причём стартует он и конфигурируется он под Nmea 9600 кбит*с, а в последующем включается Ubx на 115000. Тут трудно не согласиться с Алексеем Козиным о том, что используемая в APM скорость обмена с GPS в 38400 кбит — это тяжёлое рудиментарное наследие, перекочевавшее вместе с прошивкой APM от тех, кого обмен данными с большей скоростью повергал в первобытный ужас. Тем не менее (учитывая мнение самого Алексея Козина) вызывает некоторое недоумение факт того, что свежих прошивок с увеличенной частотой обмена данными для GPS линейки Ublox до сих пор не замечено. Возможно потому, что напрягаться со стремительно стареющим 8-битным контроллером уже считается отчасти моветоном и все серьёзные обновления будут «обкатаны» на модели контроллера с более мощными аппаратными ресурсами — например, на том же Пиксавке.
Чтобы мигал диод при фиксации 3d fix нужно в u-centr зайти в параметры ТР5 поставит галочку active и настроить period locked и duty locked
Товарищи комрады, приветствую Вас. Решил обновить конфигурацию на своем GPS модуле u-blox Neo-7. Скачал нужные файлы, программу версии 8,20, решил что лучше сделаю это через APM, препрошил контроллер, подключился через u-center к модулю GPS, залил конфигурацию, решил перенести все это к окну чтобы поймать спутники, выключил, включил и все, толком больше не смог подконектится к модулю. Пробовал и через uart, и еще раз через APM — коннектится начал, при заливке конфигурации пишет после каждой строки что привышен лимит ожидания и весь файл льет минут 8. И естественно ничего не заливает. сбрасывал модуль к стандартным настройкам Receiver — Action — Revert Config — тоже самое. Попробовал поймать спутники через APM на окне — ловит. Что я делал не так? куда копать?
Этот же модуль или другой?
Далее ответы будут тут: http://forum.apmcopter.ru/threads/gps-ublox-m8n-i-vsjo-chto-s-nim-svjazano.119/page-3#post-11147
Этот же, другого нет) Летать на нем не пробовал, боязно)
Когда заливаем файл конфигурации — там меняется скорость порта.
Получается ситуация:
1. Сначала настраиваем скорость порта в 9600, АРМ прошиваем прошивкой в 9600, коннектимся к модулю, начинаем заливать прошивку.
2. В момент заливки прошивки проскакивает команда «установить скорость порта как 38400», и текущее подключение разрывается — у нас же было настроено как 9600. Мы видим ошибки тайм-аута в момент заливки конфигурации.
Выставляем скорость порта как 38400 (опять заливаем скетч в АРМ), коннектимся к модулю на скорости 38400, и после этого запускаем заливку конфига ещё раз. Он должен прокрутить все команды конфигурации без ошибок.
Если ошибки — тогда очень тяжело. У меня есть парочка таких модулей, валяется без дела, и не работают как надо (пробовал, наблюдал за ними в МП — ничего хорошего)…
GPS: ublox 6m neo
Мозг: APM 2.6
всё подключил и собрал — gps не видит спутники, прошить через APM(со спец прошивкой) не получается пишет «тайм аут» в настройках ставил 200 Ms — 5hz!
вообще при подключении горит на gps красный диод, потом начинает мигать!
только, что ещё с бубном не бегал!
провода проверил, перепаял на прямую на плату, ничего не помогает …..
А есть у вас нормальный UART-адаптер? С ним точно будет видно, что не так.
https://laborja.files.wordpress.com/2015/04/gps-module.jpg
Всем привет. Имеется такой модуль как на картинке. В общем модуль спутники ловил но при определенном положении антены — на входе в антену провод поврежден, можно ли перепаять? Спасибо
Лучше купить готовый кусочек провода у китайцев, либо использовать провод от wifi-антенны ноутбука, укоротив под необходимую расчетную длину. Но здесь может быть все не так просто, надо изучить материал, либо просто пробовать. А лучше иметь приборы под такие частоты.
что за прибор?
Минимум антенный анализатор.
а он для чего? что делает?
Позволяет проверять и настраивать антенны, фидер, проверять нагрузки, делать ВЧ трансформаторы т.д.
Приветствую. Недавно купил neo-m8n и начало было хорошим: при подключении с помощью com-переходника на FT232R в u-center увидел спутники, координаты… Потом отложил и пытался прошить этим же переходником другой gpc-i2c, когда позже попытался снова подключить gps к компьютеру через com-переходник возникли проблемы: сначала в u-center бесконечно перебирались скорости(вместо зеленого значка внизу перебирались все возможные) при этом на com-переходнике мигал RX диод, теперь вообще ничего не происходит. Пробовал обновить и откатить драйвера com-порта — не помогло. Подскажите, пожалуйста, что я натворил и как это исправить?
А что вы говорите про i2c? Не спалили ли вы его?
А если просто перепутали название и у вас все-таки такой же модуль, как и первый с UART, то есть вариант проверить стабилизатор 3.3В и попробовать отпаять флешку и ионистор. Попробовать подключиться и при положительном результате запаять обратно последовательно.
Перечитал еще раз. А как определяется переходник? Версия Windows? Скорее всего переходник китайский и надо .28 версию драйвера. Если не найдете, то поделюсь. Драйвер, установленный автоматом может перестать работать с переходником уже со второго раза — такая защита. Но и редкий случай — сдохла ft232.
Windows 7 64, переходник определяется как usb serial converter. 28 версия похоже никак не повлияла. Переходник с полетным контроллером продолжает нормально функционировать.
Я вас не понял. А с контроллером переходник пробуете вместо телеметрии?
Да, вместо.
Вскрыл корпус: на микросхеме с маркировкой 4A2D подозрительная выпуклость, я так понимаю это стабилизатор напряжения, только datadheet на него не могу найти, чтобы проверить насколько он жив.
Там всего то 5 ножек. Где-то будет 5В входные, где-то должны быть 3.3В выходные. Откройте даташит по модулю GPS и проследите дорожки от его пинов. Будет понятно, где должно быть 3.3В.
Если я правильно понял, то на выходе 1.8В. 3.3В нет нигде.
В общем мое терпение лопнуло и я подал 3.3В с блока питания вместо выхода стабилизатора. Все заработало. Стабилизатор надо менять. Спасибо за помощь. Остался только вопрос почему он внезапно испортился?
И на APM в полете бывает подыхает без объяснения причин…
Помогите, пожалуйста, разобраться. Компас в 6M то работает, то нет. Методом многочисленных проб, ошибок, прогревов платы, перепайки проводов и многого другого, пришел к выводу, что компас не работает, если в момент подключения батареи, напряжение ниже 11 вольт.
Что выяснил.
1. Напряжение на крайних контактах GPS на APM, 4,7V.
2. Напряжение на этих выводах НЕ МЕНЯЕТСЯ, когда на батарее 9 вольт или 11. Оно всегда равно 4,7V. Т.е. стабилизировано хорошо.
Откуда тогда такая зависимость работоспособности от напряжения батареи? Все мозги сломал уже. Очень прошу помочь разобраться. Заранее благодарен. Дмитрий.
Добавлю. Даже при напряжении 9,6, т.е. очень низком, нажатие на RESET на APM, «оживляет» компас!
Давайте прикинем схему. У нас есть источник питания 11 — 5В, далее эти 5В питают всю схему. У вас оно просажено до 4.7В. Предполагаю, что когда включаете все оборудование, то напряжение может и ниже просаживается (а может и нет, но сути не меняет), а эта просадка не дает запуститься стабилизатору 5В-3.3В на модуле с компасом. Когда вы делаете Reset, то происходит какое-либо отклонение напряжения 4.7В (думаю, что в бо’льшую сторону), пусть и не заметное мультиметром, чего уже хватает, чтобы запустить стабилизатор на модуле. Варианта 2: либо добиться честных 5В с током 1А (а лучше еще с запасом), либо менять стабилизатор на модуле с компасом на LDO.
Дело в том, что на всех остальных выводах APMки, ровнг 5 вольт. И именно на этом выходе — 4,7.
Беру мультиметр на прозвонке, тыкаю на VCC
, другой конец на любой (кроме Outputs) плюс 5В, получается 0 Ом.
У меня все так же. Спасибо. При подаче питания, разница между другими +5 и данным VCC, составляет 0,3V.
Здравствуйте!Прошу помогите пожалуйста!Модуль ublox 7m.Все хорошо.Видит спутники , 3 д фикс , но при после арминга моторы начинают дергатся!Что я только не делал!И регуляторы поменял и апм перепрошил, ничего не помогает!Есть один интересный факт.Если подключить к коптеру аккумулятор , а коптер к компьютеру , то при повышении оборотов с аппаратуры , дерганье пропадает , а при отключении от компа , снова появляется!Что мне делать? Помогите!
Калибровать регуляторы по уровню газа. Дальнейшие вопросы прошу задавать на форуме.
привет всем,
У меня 2 модуля типа Neo-6m.
Оба не находят спутники. Заливал конфиг файл через модуль APM.
сразу после заливки видит спутники и захватывает 3D FIX.
после нескольких часов, опять не может найти не одного спутника.
не подскажете где копать?
Либо проблема с ионистором, либо брак самого модуля.
Ребят, подскажите такую вещь — стоял АПМ и модуль нео6, домой он возвращался практически идеально точно, ну максимум пол метра мимо и независимо т времени полётов.
Поставил пикс и модуль нео8 так даже сразу после взлёта он при RTL мажет метра на 2, а если полетать минут 10-15, то и на все 5 может промазать … пробовал ставить нео6 и ничего не изменилось … неужели у пикса и контроллером STM на борту более слабая обработка данных GPS, раз он так улетает … или это только мне так повезло?
Хотя в Loiter висит как приклеенный!!!
Подскажите пожалуйста, где можно скачать Конфигурационный файл с настройкой для APM, по старой ссылке нет его ((
У меня возникла проблема при нажатии кнопки «Debug», вылетает окно с надписью «Retrieving firmware version» и все, ничего дальше не происходит.Пытаюсь настроить Ublox NEO-6m, не подскажете, что делать?)