Приступаем к настройке основных компонентов контроллера. К первоначальной настройке хочу отнести такие процедуры как: выбор типа рамы и калибровка акселерометра. Как делается настройка остальных компонентов — будет рассмотрено подробнее позже.
Запускает Mission Planner, подключаемся к контроллеру кабелем USB или через модуль телеметрии. Переходим на вкладку «Initial Setup», открываем раздел «Mandatory Hardware» и там ищем «Frame Type». Выбираем тип рамы, например «X». Необходимо учесть, что сначала при прошивке выбирается тип коптера, например квадрокоптер или гексакоптер, а расположение моторов (тип рамы) «X» или «+» выбирается позже в этой вкладке Mission Planner. Например вы заранее определили, что будете делать «X» конфигурацию, установили прошивку для «X4» (квадрокоптера) или «X6» (гексакоптера), то тогда необходимо выбрать следующий типа рамы (изображение в MP):
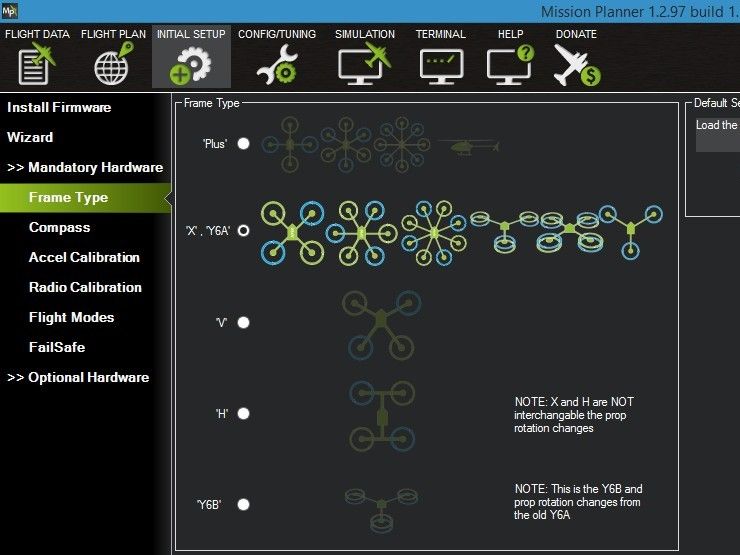
Выбор типа рамы
Кнопки сохранения здесь нет. Убедиться, что выбор конфигурации сохранился можно перейдя к другому пункту настроек и вернуться обратно к «Frame Type». Чтобы на 100% быть уверенным, что все сохранилось, можно заново подключиться программой к контроллеру и считать параметры. Затем опять открыть «Frame Type». На свежих прошивках (3.1.4) или на свежем MP (1.3.1) наблюдается проблема самопроизвольного слета настройки типа рамы «X» на «+». Периодически рекомендую проверять. Также случайно не запустите мастер настройки контроллера (может быть проблема в этом).
Дальнейшая настройка заключается в калибровке акселерометра. Важно это делать на ровной горизонтальной поверхности. Убедиться в ровности поверхности можно строительным уровнем. Также при калибровке можно пользоваться уровнем, чтобы правильно устанавливать коптер.
Открываем соседний пункт «Accel Calibration», устанавливаем коптер горизонтально задом к себе и нажимаем единственную кнопку «Calibrate Accel» (галочка «AC 3.0+» должна стоять для прошивки версии 3.0 и выше).
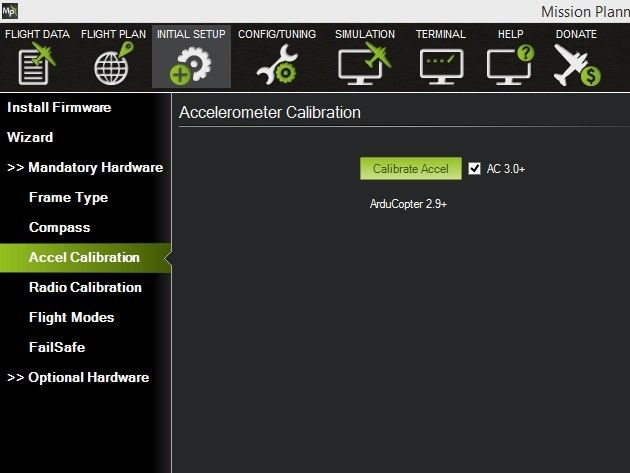
Запуск калибровки акселерометра
Программа будет писать очередность, в которой необходимо располагать коптер относительно горизонта (повернуть на левый бок, на правый бок, носом вниз, носом вверх, вверх ногами). После каждого поворота необходимо нажимать кнопку для подтверждения. В конце должна появиться надпись «Calibration Successful!», что свидетельствует о успешном окончании процедуры.

Калибровка акселерометра завершена
Тип рамы выбрали, калибровку акселерометра выполнили. Можем переходить к последующей настройке.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Делаю калибровку по инструкции. Все как на видео и в соответствии с подсказками.
Но MP все равно пишет — PreArm: INS not healthy , хотя написал до этого, что калибровка завершена.
Что делать? Накрылся акселерометр?
—
И кстати в MP после калибровки положение коптера на вкладке Flight Data не совпадает с реальным. Совсем.
Либо стабилизатор 3.3В, либо акселерометр. Еще попробуйте старую прошивку 3.0.1 или 3.1-rc5.
Не нашел более подходящей темы, спрошу тут
Настраиваю все через APM Planner 2, любые параметры сохраняются в контроллер нормально, кроме логов (LOG_BITMASK) — он всегда сбрасывается на 0 и логгирования нет
Пробовал так же QGroundControl — эффект тот же
Попробовать через MP — не могу, нет компьютера на windows.
Куда копать?
Завтра попробую через MP. На мой взгляд APM Planner сыроват.
Прошивка 3.1, MP 1.3.10 проблем нет.
Видимо в этих программах не то число подставляется, либо версия прошивки старая и эти параметры могли быть другими.
У меня прошивка 3.1.5, APM Planner для значения логов Nearly All хочет записать значение LOG_BITMASK 32767
При чем это же значение для All+DisarmedLogging. Default = 830…
Где почитать про битовые значения логов?
Тут еще APM Planner перестал сохранять значения калибровки компаса…
Хоть самому уже нормальный софт для мака пиши, коль нет нормальной))
Остается только поиграться с версиями прошивки и APM Planner и подобрать рабочую связку. А под мак вроде же есть режим, что можно запускать винду?
Есть, но нужна ведь винда при этом сама =)
На днях скачаю свеженькую 3.2 — посмотрю, может поможет.
Или по-знакомым найду ноут с виндой, попробую MP
У меня проблема. Даже несколько. Одна из них — прошиваю APM2.5/2.6 прошивкой АС 3.0+. А в настройках Accel Calibration нету чекбокса для галочки «AC 3.0+». Версия MPlaner 1.3.15.2 (последняя с офф. сайта) Что делать?
Другая проблема — не могу ARM-нуть с пульта APM. Никаких предупреждений нету в Flight Data. Стандартно THR вниз ROLL враво — не робит.
Странно. Крайний планер я не пробовал, но в 1.3.10 эта галка точно есть.
Проверяйте каналы аппаратуры и калибровку.
Каналы проверил — все нормально. Делал калибровку пультов все нормально.
Дайте ссылку на вашу версию МPlaner.
Не могу понять почему с двух пультов (PWM сигнал) и не разблокировывается APM.
Я прошивал энкодер на PPM (как написано здесь на сайте) для FailSafe, но так и не понял в каком режиме работает APM. Походу он принимает PWM сигнал, так как в настройках калибровки пишет PWM и значения максимума и минимума радиокалибровки.
Сгорел стабилизатор на 3.3В, он может давать какой то эффект?
Уже голова квадратная =) Нужна помощь. У кого какие варианты?
MP всех версий тут http://firmware.diydrones.com/Tools/MissionPlanner/
В PWM сигнале каждый канал может идти не в той последовательности. Для этого в пульте должна быть настройка очередности каналов. В окне калибровки MP полоски соответствуют стикам?
В данном случае стабилизатор 3.3В не должен влиять.
С каналами все в порядке. Пульт настроен. Да, стикам соответствует.
Все нормально настроено. Может PPM енкодер назад прошить ка то, так как я использую PWM сигнал?
Не должно влиять.
Так как разблокировать АПМ с пульта? Почему я не могу его розлочить? Какие у Вас варианты?
Уровни сигналов в пределах 1100-1900? Миксов лишних в пульте нет? Канал газа и рыскания точно правильно отображаются?
Да, все правильно отображаются
=====Газ====================
PARM, RC3_MIN, 1174.000000
PARM, RC3_TRIM, 1269.000000
PARM, RC3_MAX, 1860.000000
PARM, RC3_REV, 1.000000
PARM, RC3_DZ, 0.000000
=====Риск.==================
PARM, RC3_MIN, 1174.000000
PARM, RC3_TRIM, 1269.000000
PARM, RC3_MAX, 1860.000000
PARM, RC3_REV, 1.000000
PARM, RC3_DZ, 0.000000
======Риск.===================
PARM, RC2_MIN, 1156.000000
PARM, RC2_TRIM, 1489.000000
PARM, RC2_MAX, 1810.000000
PARM, RC2_REV, 1.000000
PARM, RC2_DZ, 0.000000
(выше не тот канал для рыскания)
В каком режиме апм? Как мигает красный светодиод на плате?
Stabilisation — режим
Да мигает (Blink = disarmed)
Т.е. мигает одиночными, не двойными?
А через кнопку ARM в MP работает?
Да, одиночным.
Да работает, с программы могу сделать АRM
Может, слишком долго держите, там после определенного времени идет режим autotrim?
У меня бывает не армится с пульта в поле, но лечится выкл/вкл питания. Обычно с первого раза помогает.
Все заработало, перепаял стабилизатор. Спасибо всем.
Всех приветствую.Может кто сталкивался,активация происходит элеронами.То есть что бы сделать арминг левым Стиком мне нужно выставить mode4.Подключено правильно,а началось по-моему с того что я прошил аппу на er9x._Прошивал неоднократно разными прошивками результата нет.Может я в миссионе где то накосячил?
В меню аппаратуры внизу выбирайте Mode2 и последовательность передачи каналов. Если не ошибаюсь, то должна быть надпись AETR (Aileron Elevator Throttle Rudder). Именно в такой последовательности надо подключать каналы.

AETR у меня это mode3.Сегодня вечером попробую.
—
AETR все заработало!Не там искал.Спасибо еще раз.
Подскажите что настроить , квадрик на раме F450 , APM 2.5
делал пробный взлёт , правда в квартире поднял его и чуть тронул стик Roll он как бешенный рванул в сторону ? Очень чувствителен , как изменить чтоб плавно реагировал при работе стиками , аппа Таранис+
Рванул в эту сторону, куда дернули?
Убрать все миксы с аппаратуры, выставить расходы/лимиты, чтобы уровень сигнала по стикам был в районе 1100-1900, откалибровать аппаратуру в MP.
Если рванул в другую сторону, то проверять правильность подключения моторов.
Аппа новая в ней этих настроек кажется не сделаны по умолчанию, и я пока ничего не настраивал , потому как пока изучаю эту аппу .
Где в каком экране меню это всё убрать и настроить ?
—
Рванул куда отклонил стик
Алексей, не подскажу. Читайте инструкцию по ней.
А коптер по уровню выставлять? А то приделал шасси, коптер стал криво. Откалибровал дома, при запуске коптер летит назад. Откалибровал прямо на снегу, всё заработало.
По уровню выставлять контроллер. В конечно итоге же, чтобы коптер висел — надо ровное положение контроллера, иначе, если откалибруете по кривым ногам, то туда и полетит.
Доброго времени суток. Подскажите пожалуйста, для рамы клон «TBS Discovery» в МР какой тип рамы выставлять «X» или «V» ? И еще проблема наблюдается: после взлета , правый стик вперед, а коптер отклоняется назад и наоборот. Тоже самое относительно наклона в лево и право. Как будто реверс на канале установлен. Но в аппа все ок. Где копать, подскажите? Может компас виноват
http://forum.apmcopter.ru/threads/zerkalnoe-upravlenie-pereputany-kanaly-revers.708/