
Доброго времени суток! Уважаемые читатели, эта статья для совсем зеленых коптероводов.
Вы получили Ваш долгожданный контроллер, не торопитесь подключать питание и смотреть что произойдет — это может кончиться не совсем благополучно.
Для начала — под минимальным комплектом Я понимаю:
- Контроллер APM 2.5.x или 2.6.
- Блок GPS с контактным проводом.
- Соединительные провода между приёмником и контроллером (мама-мама).
Контроллер комплектуется разными PLS контактами: прямыми и под 90 градусов — их каждый для себя выбирает сам, смысл в удобстве монтажа платы контроллера на летательном аппарате. Бывает что китайцы умудряются подсунуть намагниченные выводы, в дальнейшем это отражается на неправильной работе компаса, что в дальнейшем влечёт за собой неадекватное поведение коптера в режиме удержания позиции «Loiter» (о режимах в другой статье). О пайке разъемов написана статья «Пайка разъемов на плате APM».
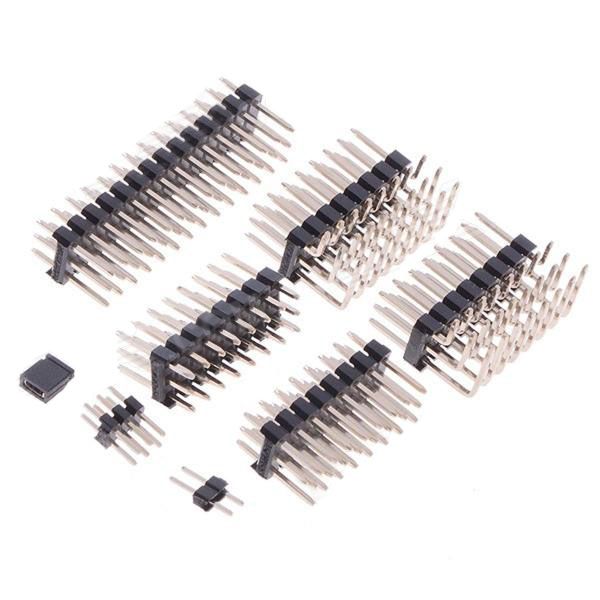
Контакты PLS
Первым делом Нам надо взять контроллер в руки и внимательно осмотреть (можно с увеличительным стеклом): целостность элементов, качество пайки и наличие загрязнений(как не отмытый флюс , сопли) — устранить косяки крайне осторожно, что бы не повредить чувствительные датчики, например барометр (на период чистки лучше заклеить хорошей изолентой).
Плату осмотрели, теперь необходимо проверить ее работоспособность. Устанавливаем на компьютер ПО — Mission Planner (далее MP) для APM.
Рекомендуется выбрать самую последнюю версию ПО. Далее всем привычное «Далее» > «Готово»!
ВАЖНО!
Не подключайте на данном этапе сторонних устройств, таких как GPS, регуляторы скорости, альтернативные источники питания. Пока нам надо только проверить работоспособность платы.
Берём наш контроллер и microUSB кабель.

Подключение кабеля micro-USB
Подключаем контроллер к компьютеру и ждем установку драйвера, обычно проходит в штатном режиме. Но если по какой либо причине драйвер не установился , необходимо указать поиск драйвера в папке с установленным MP в ручную.
Запускаем MP, в верхнем правом углу проверяем порт, который присвоился контроллеру. У каждого порт свой и узнать его можно в диспетчере устройств (Мой компьютер — управление — диспетчер устройств)
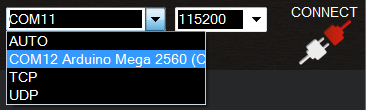
Выбор порта
Нажимаем на «CONNECT» и ждем соединения.
Считывание параметров
После успешно подключения берём контроллер в руки и смотрим за цифрами и картинками, которые отображаются в окне MP «Flight Data», всё должно шевелиться и меняться, реагировать на каждое движение. Пытаемся понять какое показание за что отвечает. Смотрим на отклонения по крену, тангажу, смотрим на поворот компаса. Для начала этого хватит. Радуемся и отключаемся — там где нажимали CONNECT, теперь сияет надпись DISCONNECT. Наш контроллер рабочий — это уже хорошо. Улыбаемся.
Если подключения не произошло, то китайцы могли и не загрузить прошивку, тогда нам надо загрузить ее. Как? Описано здесь: Прошивка контроллера APM.
Теперь Нам необходимо провести более детальную проверку датчиков установленных на плате контроллера, а конкретно это гироскоп и акселерометр. Для этого подключаем контроллер к ПК. Запускаем программу МР, устанавливаем соединение, жмём CONNECT.
Следующий этап — в окне программы МР на вкладке «Flight Data» ищем слово «Действия», затем «Просмотр сенсоров». В открывшемся окне увидим графики, отображающие работу датчиков (сенсоров).

График гироскопа
При повороте контроллера мы видим кратковременное отклонения значений и дальнейший возврат значений в «ноль».
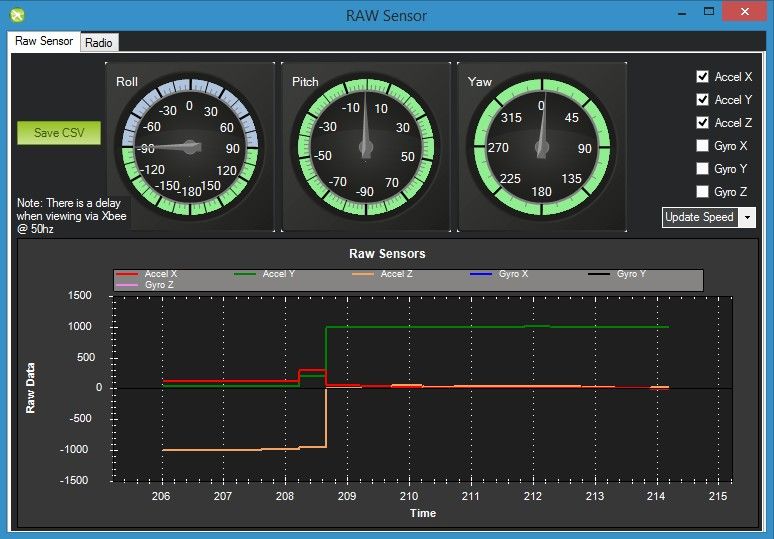
График акселерометра
При повороте контроллера мы видим изменение значений и дальше эти значения сохраняются, пока опять не повернем контроллер.
Вернемся на окно «Flight Data» и посмотрим на работу электронного компаса. На данном этапе показания могут быть не верны (в дальнейшем будем производить калибровку), нам пока важны примерные показания, означающие что компас работает.

Показания компаса
При повороте контроллера мы видим изменение положения в градусах (0-север).
Мы проверили Наш контроллер на работоспособность.
О подключении модуля GPS и приёмника Р/У в следующих статьях…
Update 15.04.2014
Более правильно оценить работу компаса будет через терминал. Подключаемся к терминалу (после включения платы быстро нажать кнопку «Connect» в окне терминала), набираем команду «test», набираем команду «compass», дожидаемся инициализации гироскопа (в неподвижном состоянии платы!) и далее видим бегущие строчки направления, осей и офсетов. Крутим плату на 360° и приблизительно оцениваем значения.
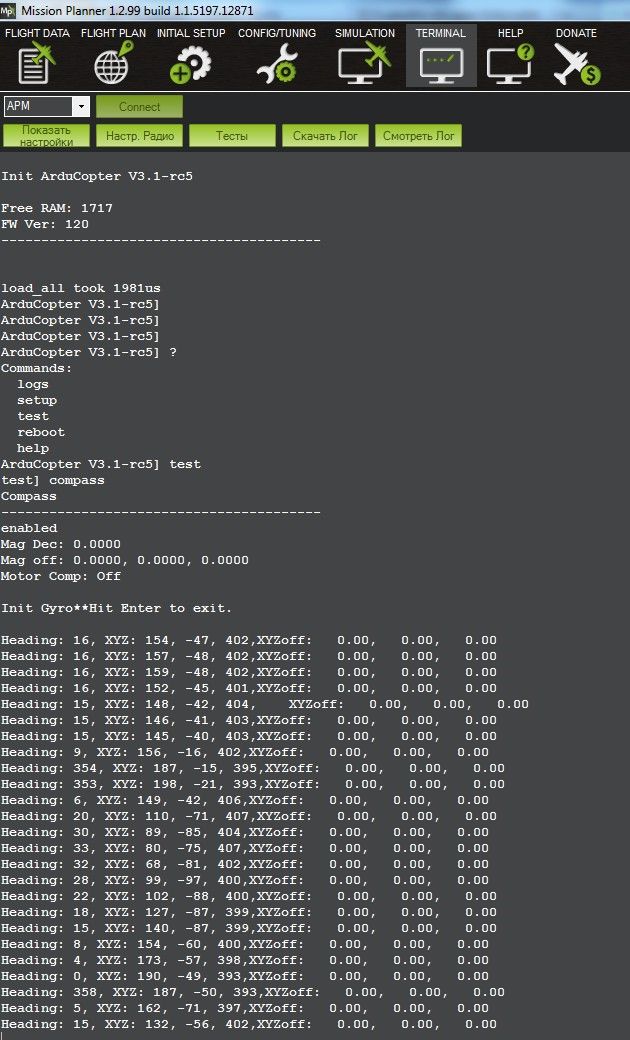
Проверка работы компаса
После того, как наигрались, нажимаем клавишу Enter на клавиатуре и терминал можно закрывать.
maksim4ek, raefa # apmcopter
Update 25.06.2014. Видеоинструкция от Юлиана. Посылка с комплектом.
В данном видео описаны комплектующие части, которые нам понадобятся для постройки коптера на нашем любимом контроллере.
cezarepicentr # apmcopter
Update 26.07.2014:
Еще более простую проверку работы компаса можно осуществить через вкладку «Статус» окна «Flight Data». Там нас интересуют переменные «mx», «my», «mz».
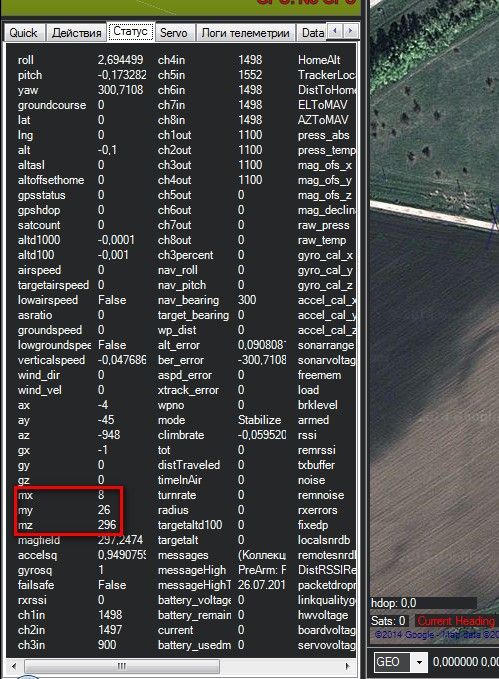
Проверка работы компаса
raefa # apmcopter
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





От начала прошло почти 2 месяца. Когда продолжение будет?
Сайт создал, а наполнять времени не было. Сейчас свободнее стал. Если есть желание помочь, то буду очень рад.
Вот только электронный компас сверху будет крутиться даже при отключенном компасе на плате. Он от гироскопов крутится. Что создаёт некоторые проблемы при проверке. Вернее всего компас проверять из терминала. Там «Test -> compass» или как-то так.
Добавил информацию. Спасибо.
Офигенный сайт! НЕВЕРОЯТНОЕ СПАСИБО!!!!!!!!!!!!
У меня с первого раза драйвера Arduino Mega 2560 на Win8 x64 не захотели ставится ни при каких условиях. Скачивание в разных мест положительного результата не давали. Драйвера не ставились и все ты тут. Пока с сайта arduino.cc (точная ссылка: http://downloads.arduino.cc/arduino-1.5.6-r2-windows.exe) не скачал пакет. Там в инсталере есть драйвера, после установки этого пакета в диспетчере устройств Arduino Mega 2560 определилась автоматом. Может кому из начинающих поможет мой опыт.
Спасибо Вам, реально помогло!
А сами драйвера где-то есть, чтобы не ставить лишние программы?
Помогло… респектище… спасибо…
Спасибо, ссылка помогла
Как пользоваться этой программой?
спасибо очень помогло!
Добрый день, Вы не могли бы выложить конкретное место, где заказывали подобный комплект контроллера. А также программатор в том же месте продавался?
Добрый день!
Свои платы я покупал в магазинах RCTimer и MyAirBot.
Так же хорошую плату можно купить у Алексея Козина. Информация на его сайте.
У Юлиана комплект с Banggood.
Программатор можете купить где угодно, например на banggood тоже есть. У меня этот USBasp и его хватает. Еще рекомендую сразу купить адаптер USB-COM FT232RL на будущее (пригодится для настройки GPS, OSD, подвеса).
Подскажите пожалуйста чем отличаются эти две платки, одна программатор, а вторая ком-юсб переходник. Какая для чего используется?
Касательно APM:
1) Программатор нужен обычно для заливки потертого загрузчика на микросхемах ATmega2560 и ATmega32U2, так же полностью прошивку можно загрузить им, не пользуясь Mission Planner. Чтобы загружать через MP, требуется присутствие обоих загрузчиков.
Так же требуется для обновления прошивки на OSD.
2) Переходник нужен для заливки конфигурации в модуль GPS, для настройки OSD, для настройки модулей телеметрии при тяжелом случае (когда модули сбились относительно друг друга). Такое может наблюдаться из-за неправильных действий пилота или, если китайцы забыли настроить модули друг на друга.
Бонусом переходника FT232RL является то, что и его можно использовать в качестве программатора. Совместим с avrdude. А вообще советую почитать статьи на сайте про загрузчики.
Здравствуйте! Такая проблема, при подключении к компьютеру дальше чем RC6_trim загрузка не идет. ((( пробовал менять компьютер, менял провод, менял на более ранние прошивки. Вычитал что это может быть проблема в питании с MPU-6000, здесь один из примеров решения проблемы (правда для меня не совсем понятно как) http://flight.farbird.com/2014/02/repair-blown-33v-regulator-on-ardupilot.html
Замерил напряжение на стабилизаторе питания 3,3 вольт как и должно быть. На 13 ноге самого MPU-6000 питание тоже есть 3,3 вольт.
В чем может быть проблема?
P.S. На ранних прошивках загрузка останавливалась раньше чем RC6_Trim
В статье по ссылке товарищ снял родной стабилизатор 3.3В, а с другой платы Arduino подал 3.3В в разъем i2c. После этого у него заработало.
В вашем случае, если говорите, что 3.3В у вас есть, то неплохо бы проверить их под нагрузкой с током около 100мА. Если напряжение не падает, то все хорошо, иначе менять. Либо проблема с чипом MPU6000. Попробовать пропаять его или поменять.
Там по 3.3 питаются барометр, акселерометр и прочая шняга. Для определения работоспособности стабилизатора нагрузки достаточно. А вот нагружать его 100 мА — это уже его предельый ток, можно и попалить. Правда эта лирика не помогает решить проблему :((( Где то на форумах сталкивался, что у человека были замкнуты дорожки на плате, но где и что он не поделился.
Я новичок в этом деле. Столкнулся с такой же проблемой дальше чем RC6_trim загрузка не идет. При подключении компаса и gps доходит до RC8. Вопрос для Mazur, нашел ли причину?
Mazur удалось решить проблему?
Добрый день. Пара вопросов.
1. Правильно ли я понимаю, что вместо Mission Planner теперь APM Planner?
2. На Banggood (http://apmcopter.ru/go2/http://www.banggood.com/APM-Flight-Controlt-Set-APM-2_6-And-GPS-And-OSD-And-Radio-Telemetry-Etc-p-920659.html) оказался не 2.6, а 2.5.3 (как написано на плате). Есть какие-то принципиальные отличия? Может не так круто все будет?
1) Кому что нравится. APM Planner мне показался унылым… В Mission Planner больше настроек и он должен быть более вылизан в плане кода. Обновляется и то и то постонно. В обоих программах есть свои глюки, но, ИМХО, в APM Planner их больше.
2) А вспомните, что на заборе написано? Так вот и китайцы могут в названии и описании написать что угодно, в комментариях сказать другое, а прислать третье. Если ориентироваться на оригинальные названия, то версии APM бывают: 1, 2, 2.5, 2.6. Все! Все, что остальное — это китайский бред. Из отличий только то, что 1 версия была модулем под плату Arduino Mega 2560, вторая уже на своей плате с GPS на второй модульной плате и съемной SD-картой, 2.5 — самая распространенная и привычная плата, а 2.6 что и 2.5, только без компаса на борту.
Есть еще известная китайская 2.5.2, продаваемая на RCTimer, и версия 2.5.2.Megapilot с доработками Алексея Козина.
Всякие 2.5.3, 2.7, 3.0, 3.0 mini — это китайские названия и лишь китайцу известно, что они там наделали.
Подскажите, собрать Ардупилот на базе Arduino DUE(AT91SAM3X8E)и что докупить надо?
Зачем?
Хотите сэкономить? Не получится.
Хотите код переписать? Ну может получится.
А докупить то всего надо: гироаксель, барометр, компас и еще сопутствующую мелочевку.
Еще надо разработать плату, запаять…
Не проще купить готовую плату?
для того чтобы сделать автопилот на другой платформе — основные затраты -программный код, если есть желание и возможность его писать — тогда можно подбирать набор датчиков. датчики на ваш вкус, в зависимости от возможностей программиста
понадобится 3д гироскоп, 3д акселерометр, 3д компас, барометрический альтиметр, жпс-навигационный модуль. плату с датчиками возможно придется изготовить самостоятельно, но в принципе бывают датчики в виде «шелдов» 6DOF 9DOF (это такие платки на которых установлены несколько сенсоров)
заморачиваться с переписыванием на новую платформу имеет смысл лишь в случае если есть очень большое желание погрузиться в программирование
Народ, приветствую. Могут ли высоковольтные провода повлиять на контроллер APM? Сегодня вышел в поле, включаю питание. Смотрю OSD не работает, переподключил, все надписи в перемешку. Делаю арминг, винты слегка крутятся, прибавляю газ, немного обороты поднялись и все. Поехал домой, подключаю телеметрию, сбились настройки режимов полета. Восстанавливаю, делаю арминг, все нормально.
Высоковольтные это больше 1кВ? Или больше 110кВ? 🙂 Летали рядом с ЛЭП? Ну то, что навигация может криво работать — это да, а чтобы настройки переклинило…
10 тыс вольт)) Я даже взлететь не успел, просто стоял в 100 метрах от ЛЭП. Но компас показывал верно все. Из различий в условиях между полем и огородом Это наличие ЛЭП и ветра в поле. Надо еще на это поле съездить. Может мистика)))
случайно не используете ли приложения для андроида для настройки параметров?
были случаи просто
Нет. Ни одного андроида с драйверами на ftdi не нашел, поэтому даже попробовать не получилось.
Кстати, вспоминаю. Я летал, самые первые для арду, 2 дня между двумя ЛЭП 110кВ. Я стоял между ними, расстояние было до них около 100 метров. На коптере летал то к одним проводам, то к другим. Подлетал метров до пятидесяти. Все гуд.
Я тоже подумал, нереально, что бы ЛЭП могли повлиять так выборочно на некоторые настройки.
raefa, не знаете почему на одном аккумуляторе моторы слабо крутятся? Если бы ток разряда был бы не 30с, а меньше, то аккум по идее должен был раздутся, напряжение упало бы. Я коннектор перепаивал, может быть в этом проблема?
—
Я все таки ошибся. Когда ставлю газ на 100% обороты моторов постепенно начинают увеличиваться. Как будто с опозданием реагируют на стики.
Выяснил почему обороты не поднимались. Поменял аккум, начал взлетать. Значит сбитые настройки и обороты моторов не связяны. Перепрошил контроллер версией 3.2.1, пока все нормально. Но не могу понять почему на этом аккуме моторы слабо крутятся? Проблема в токе разряда что ли? Указано 30с.
Вздутость аккумулятора — совсем не показатель его токоотдачи. Токоотдача понижается вместе с зарядом («емкостью»). Либо бракованный, либо уже отлетал свое. Коннектор какой перепаивался? Конечный от проводов или сам аккумулятор зарбирался и была перепайка самих выводов, которые из банок вылазят? Если там паяли, то аккумуляторы вообще не любят нагрева (но у меня не было случаев, чтобы от пайки из строя выходили).
С этим тоже разобрался, может кому пригодится: после того сбоя в advanced params значение throttle maximum стало 80, а должно быть 1000. Поэтому и не крутились моторы на всю мощьность.
Доброго времени суток. Очень нужна помощь, контроллер АПМ 2.6 перестал коннектиться в МР, до этого все работало. Уже несколько раз поэтапно прошивал, все прошивается но как только коннект то ничего не происходит.
На чем встает? Ошибки есть?
Из вариантов: сдох стабилизатор 3.3В — проверять наличие 3.3В ан разъеме I2C; сдох мультиплексор — проверять по статье Сгорел мультиплексор TS5A23157.
Может запамятовали, что по кабелю надо подключаться на 115200, а по телеметрии 57600?
http://www.banggood.com/APM-Flight-Controlt-Set-APM-2_6-And-GPS-And-OSD-And-Radio-Telemetry-Etc-p-920659.html?utm_source=bbs&utm_medium=banner&utm_campaign=Boscam&utm_content=chenkeren
http://ru.aliexpress.com/item/APM2-6-ArduPilot-Flight-Controller-APM-2-6-Ublox-6M-GPS-w-Compass-PM-915Mhz-3DR/2051170271.html?adminSeq=220491758&shopNumber=1085370
Подскажие пожалуйста, есть ли принципиальная разница в этих наборах или разница только в цене? Спасибо за понимание, затянуло, надоели готовые квадрики и хочется посерьезнее собрать.
Разницы практически никакой. Мелочи…
На банггуде необходимо написать или уточнить, с какой частотой будет телеметрия.
На Банггуде 433, а тут 915. Подскажите пожалуйста, а тут какая разница?
Если ценник отличается в 2 раза, то без разницы какая телеметрия. А выбор таков:
По законности 433 более привлекательно. По работе 915 должно быть постабильнее, т.к. диапазон более чистый. А вообще все зависит от вашего региона. Не плохо бы заранее посмотреть анализатором спектра.
433 очень сильно шумит. причем излучение идет не от антенны а от платы и от подводящих проводов. при использовании 433 модемов обязательно экранировать зону платы и кольцо на шлейф
Вот что и насторожило больше всего, это цена. Разница в два раза. Спасибо за разъяснения, с контроллером определился. С рамой тоже более-менее понятно. Вот сложность вызывает правильный подбор моторов, регуляторов, аппаратуры и акумчика. Аппаратуру приглядываюсь вот к этой — RadioLink AT9, есть конечно подешевле, присоветуйти пожалуйста комплектующие, бюджет не сильно, но ограничен, рама 450, спокойные полеты, поснимать окресности новичкам. Будем очень вам благодарны с внуком.
Про подбор ВМГ на форуме есть 2 темы, прошу туда.
По аппаратуре не подскажу. А почему выбор склоняется к ней? Может взять самую обычную Turnigy, если это первый опыт?
Подскажите пожалуйста если плата АРМ без встроенного компаса то при подключении её к МП без GPS модуля,то наклоны в стороны и вперёд- назад отображаются всё правильно. А вот при повороте вокруг своей оси компас же не должен ни чего показывать, ведь его нет на плате.А тут всё поворачивается, или я что то не так понимаю? спасибо.
Это нормально. Ответ в этом комментарии. http://apmcopter.ru/apm/apm-setup/ya-poluchil-kontroller-chto-dalshe.html#comment-65
Без компаса оторражение на экране поворачиваться будет, но с задержкой и гуляниями немного, а с действующим компасом реакция будет значительно быстрее и устаканивание показаний так же будет быстрее.
Всем привет. Подскажите кто знает. Mini apm 3.1. В диспетчере устройств определяется нормально. А к mission planner не коннектится и не шьется. Вроде и лампочки все моргают. По крайней мере внешних изменений в поведении нет. Даже при подсоединении GPS -спутники находит. (По синей лампочке смотрю. начинает постоянно гореть ). Может как то можно оживить?
в новых версиях нет Кнопки терминала, что делать или я плохо искал?
Может быть глюк. Обновите программу принудительно через вкладку Help.
Добрый день. Подключил свой АПМ к компу. у меня показывает сообщение bad health compass. Что нужно сделать что бы его вылечить?
И — на этапе проверки работы датчиков тцт -» в окне программы МР на вкладке «Flight Data» ищем слово «Действия», затем «Просмотр сенсоров». В открывшемся окне увидим графики, отображающие работу датчиков (сенсоров)» — при переходе к вкладке датчиков у меня показывает только датчики, никаких графиков с отклонениями нет.