Для того, чтобы насладиться всеми возможностями контроллера APM, нам понадобится совместимый GPS модуль. Это даст возможность использовать режим удержания позиции, режим возврата домой, режим авто-миссии, а так же режим спасения от нештатных ситуаций. Рассмотрим все далее.
Какие возможности появляются при использовании GPS на контроллере APM?
Без использования модуля GPS мы можем воспользоваться лишь несколькими (рассмотрю основные) полетными режимами:
- Stabilize — основной режим, в котором рекомендуется взлетать и производить посадку.
- Acro — режим, при котором можно достичь более резкого и быстрого полета.
- AltHold — режим удержания высоты.
При наличии модуля GPS можно воспользоваться дополнительными режимами:
- Loiter — режим удержания точки (по координате и высоте).
- RTL (Return To Launch) — возврат домой, в точку взлета.
- Auto — полет по точкам миссии.
- Position — удержание позиции (только по координате).
- Circle — полет по окружности носом к центру
- FailSafe — RTL — режим спасения, который отправит коптер лететь домой.
- GeoFence — режим, при включении которого можно ограничить радиус и высоту полета.
Более детально эти и другие режимы рассмотрены в статье «Полетные режимы».
Какие модули GPS совместимы?
Разработчик предлагает приобрести вот такой: 3DR uBlox GPS with Compass Kit. Данный модуль состоит из GPS ublox LEA-6H и компаса HMC5883L на борту.


У китайцев имеются модули на чипе ublox NEO-6M, например u-Blox CN-06 GPS Receiver V3.0 на RCtimer.com или NEO-6M Ublox/u-blox GPS Module for MWC/APM на MyAirBot.com.

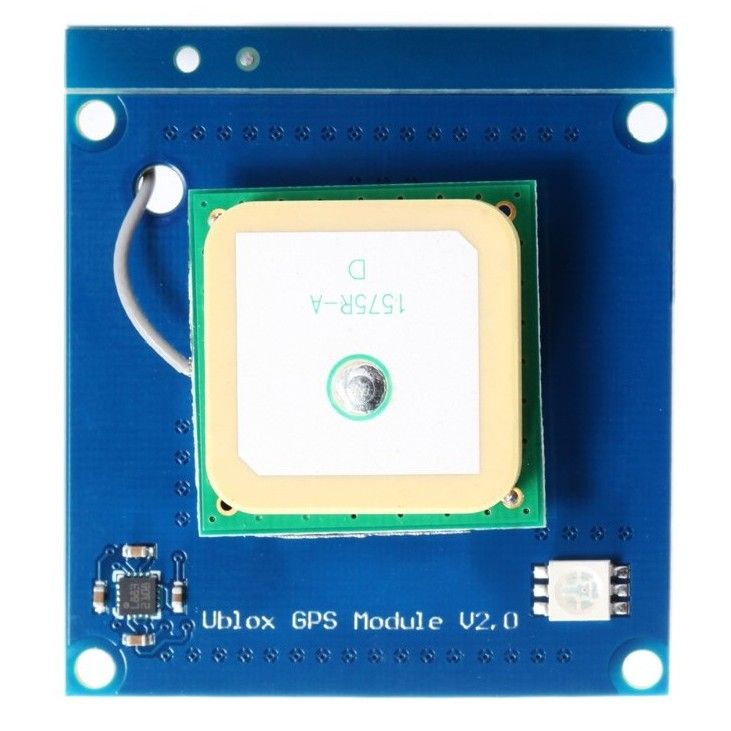
Из моих наблюдений: не стоит переплачивать за модуль LEA-6H, а можно ограничиться NEO-6M. На практике разницы никакой. Сравнительная таблица тут (и тут копия).
Также возможно применение модуля MTK3329, MTK3339.
Рекомендую модуль GPS купить и настроить сразу,
чтобы можно было пользоваться всеми доступными режимами!
Update 28.04.2014: GeoFence.
Update 21.10.2014: Хорошо зарекомендовал себя гибридный модуль GPS+Глонасс MTK 3333, о котором можно почитать и посмотреть видео.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





В комплекте с gps от myairbot идут 4 трапецевидных пластины. Зачем они нужны? Экранировать помехи? Как их правильно устанавливать и есть ли в них толк?
Пластины предназначены для организации противовеса (земли) антенны. Простоы штырь в антенне же не работает, нужна земля, что согласовать сопротивление и т.д. Как пишут на форуме RCDesign, с ними прием лучше. В установке ничего сложного нет. Необходимо их спаять с платой модуля по всему ребрам и запаять ребра трапеций между собой, чтобы получить усеченную пирамиду.
Подскажите а где у ублокса перед?
У GPS нет переда. Если на плате с ним есть компас, у которого есть перед, то определить его можно по точке на чипе компаса. Где-то на этом сайте встречал информацию по этому поводу
У модуля GPS нет направления. Это касается компаса, если он размещен на плате с GPS.
К сожалению разница какой модуль использовать есть. Разница в том что при настройке мой neo-6m все что я настроил сбивается при отключении питания более чем на пол часа. С настройкой ловит 8 спутников за 2 минуты (холодный старт) на подоконнике, после получасового лежания без питания уже хоть 2 часа на подоконнике может лежать — больше 2-3 спутников не ловит…
Какой модуль взять чтоб он не сбивался без питания?
Дайте ссылку на ваш модуль или картинки.
Вот точно такой модуль как у меня
http://static.rcgroups.net/forums/attachments/1/3/7/6/6/2/a6885242-155-DSCF1225.JPG
С обратной стороны все место занято антенной
Ну раз это не ваша картинка (тут просто ужасно запаяна память), то проверяйте все, что касается питания (на входе стабилизатора 5В, на выходе 3.3), питание, пайку и правильность дорожек к микросхеме памяти (похоже она у вас такая http://www.datasheetarchive.com/dl/Datasheets-AS1/DSAASSA0001044.pdf).