
Как нам уже известно, контроллер APM очень богат разнообразными полетными режимами, которые каждый пилот может использовать для своих целей. Рассмотрим эти режимы более детально и произведем их выбор в Mission Planner.
О полетных режимах начал писать в статье «Использование модуля GPS», здесь продолжаю.
Без использования модуля GPS мы можем воспользоваться лишь несколькими (рассмотрю основные) полетными режимами:
- Stabilize — основной режим, в котором рекомендуется взлетать и производить посадку. Задействованы гироскоп и акселерометр, компас дополнительно для контроля и коррекции. Управление газом производится вручную — для висения обычно действует правило — уровень газа 50% (это достигается при оптимальном подборе комплектующих, либо коррекцией уровня под тяжелые коптеры). Единственная помощь в этом режиме — удержание горизонта. При максимальном отклонении стиков крена и тангажа коптер не будет отклоняться больше 45° относительно горизонта.
- Acro — режим, при котором можно достичь более резкого и быстрого полета. Соблюдаются все те же условия, что при режиме Stabilize, только коптер может отклониться уже до 60°.
- AltHold — режим удержания высоты. В данном режиме добавляется использование бародатчика, который способствует удержанию высоты. Для наиболее правильной работы необходимо, чтобы уровень газа висения коптера был 50%. При положении стика газа в 50% и включенном режиме коптер должен сам удерживать высоту, на которой вы включили этот режим. При повышении или понижении газа происходит изменение высоты со скоростью, прямо пропорциональной величине отклонения стика вверх или вниз.
- Land — режим автоматической посадки в текущем положении. Используется бародатчик для контроля высоты.
- Simple — режим, который позволяет «забыть» об ориентации коптера относительно пилота. В данном режиме самым важным является компас. При арминге контроллер запоминает направление по компасу. При взлете и повороте коптера вокруг оси (рыскание), контролер сам учитывает, на сколько повернут коптер, и сам вносит поправку в радиоуправление так, что если, например, развернуть коптер передом к себе, то при отклонении стика тангажа от себя, коптер полетит на удаление, а не на приближение. Этот режим тоже хорош для начинающего пилота. При использовании этого режима важно не менять свое положение (не поворачиваться) и помнить, в каком направлении стоял коптер перед взлетом.
При наличии модуля GPS можно воспользоваться дополнительными режимами:
- Loiter — режим удержания точки (по координате и высоте). Режим хорошо подходит для обучения полетам, фото и видеосъемки.
- RTL (Return To Launch) — возврат домой, в точку взлета. Контроллер запоминает точку, где произвели Arming и позволяет вернуть коптер в эту точку.
- Auto — полет по точкам миссии. Миссия может создаваться вручную через ПО Mission Planner, а также можно добавлять точки, используя дополнительный тумблер на аппаратуре радиоуправления.
- Position — удержание позиции (только по координате). Режим хорошо подходит для фото и видеосъемки.
- Circle — полет по окружности носом к центру. Позволяет автоматически облетать какой-либо объект вокруг.
- FailSafe — RTL — режим спасения, который отправит коптер лететь домой. Режим можно настроить на включение при срабатывании одного/нескольких условий, таких как: потеря сигнала РУ, потеря сигнала телеметрии, низкий уровень заряда аккумулятора. При потере сигнала GPS можно выполнить режим Land.
- Guided — полет по команде, данной с наземной станции (компьютер с Mission Planner). Задается точка на карте и нажимается кнопка «Лететь сюда».
- FollowMe — полет «хвостиком» за ведущим. Ведущим может быть ноутбук, на котором установлен модуль GPS. Коптер будет следовать за ведущим в том же направлении и с той же скоростью. Режим будет интересен тем, кто хочет снять себя на видео, например на велосипеде.
- Super Simple — режим, который до 10м радиусе не вносит поправок в управление, а на удалении больше 10 метров работает на «притягивание к дому», т.е. если стик тангажа тянуть на себя, то коптер полетит к точке дома. Больше 10 метров также не важно, как коптер ориентирован, т.е. как в Simple. Удобно, если «зарулились».
В крайних версиях прошивки (начиная с 3.1.х) еще добавлены режимы, такие как: Sport, Drift, Hybrid. О них позже…
Пока нам этого достаточно. На первых порах нас больше всего интересуют 2 режима: Stabilize и Loiter. Stabilize — основной режим, в котором лучше всего взлетать и садиться. Если в этом режиме коптер висит и летает достаточно хорошо (никуда его не сносит, не падает, хорошо слушается стиков), то с большой уверенностью можно сказать, что все было сделано правильно или почти правильно. Loiter — режим, с помощью которого (повторюсь) лучше всего начинать учиться летать, т.к. он достаточно спокойный и подходит начинающему пилоту. Если в этом режиме коптер хорошо держит позицию (не сносит по сторонам, не крутит кругами, нет просадки по высоте), то считаем, что тоже все сделано правильно.
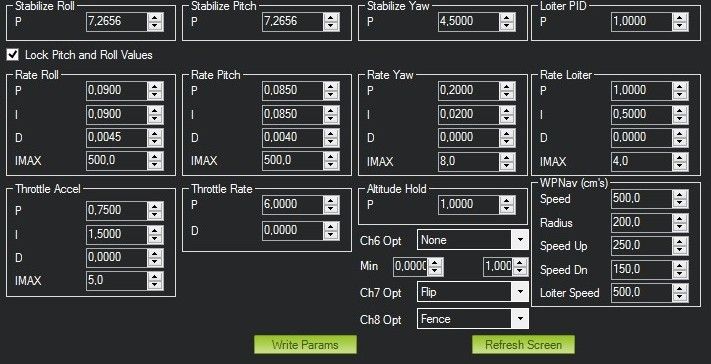
Прежде чем попробовать эти режимы — нам сначала их необходимо настроить. Настройка осуществляется в Mission Planner. Запускаем программу, подключаемся к контроллеру APM. Далее переходим к вкладке «CONFIG/TUNUNG» — «Flight Modes» и видим окно настроек:

Настройка полетных режимов
На данном изображении показано, как я обычно делаю настройку режимов.
Думаю, что с переключателем режимов вы уже определились, тогда можно приступить к настройке. У меня используется переключатель по схеме Алексея Козина, поэтому я не буду говорить «переключаем тумблер», а буду говорить «нажимаю кнопку». Еще раз проверяем, как работает переключатель, т.к. щелкаем все 6 кнопок по очереди и видим подсвеченную строку режима. Первый режим у меня — Stabilize. При включении пульта переключатель устанавливает низкий уровень импульса. Второй режим тоже Stabilize, но к нему добавлена настройка «Simple mode». Третий режим у меня для частого изменения, т.е. меняю по мере надобности. Четвертый — Alt Hold, пятый — Loiter, шестой — RTL. В итоге получается удобная для меня последовательность режимов: в начале — взлетел, по необходимости включил Simple, в центре режимы по необходимости, в конце — для висения в воздухе и возврата автоматом к дому, нажимаю соответствующую кнопку.
К данной настройке особых рекомендаций нет и делать можете, как вам удобно! После изменения настроек необходимо нажать кнопку «Save Modes» для сохранения. Перед каждым полетом советую заглядывать в Mission Planner, чтобы вспомнить ваши настройки полетных режимов.
Update 28.05.2014: Перенес режим Super Simple в режимы, зависящие от GPS.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Вопрос по поводу супер симпл режима — как идёт отсчёт 10 метровой окружности без джипиэс? И маленькая поправка — симпл и суперсимпл всё-таки не отдельные режимы, а добавки к режимам.
Поправил. Конечно этот режим зависит от GPS. А по поводу отдельного режима или добавки — трактуйте как хотите 🙂 Больше склоняюсь, что это режим, т.к. его можно повесить на отдельный канал (7 или 8) и не назначать в настройке полетных режимов.
Скажите, Circle — полет по окружности носом к центру использует GPS для определения центра вращения? И Как определяется этот центр вращения в момент включения режима?
Вы задали радиус, например 10 метров. Повесили коптер в нужном положении. Вот перед его носом 10м — это и будет центр вращения. Если поставить радиус 0, то будет кружиться вокруг оси (удобно для панорамной съемки).
Спасибо!
Мой коптер был предварительно настроен и летал хорошо.
В стабе немного подкручивало yaw по часовой стрелке, особенно при взлёте.
В альтхолде все было мягко и без проблем. Yaw не крутило.
Был сделан автотюн, но после него осталось небольшое постоянное подёргивание луча 3-4.
Дальнейшее уменьшение пидов приводило к вялости и тупости машины.
Лоитер работает хорошо. При 8 спутниках стоит на месте.
Киркле крутит по пять кругов и только чуть сдувается ветром.
Ртл отрабатывает посадку в 50 см круг от точки старта.
Решил я проверить режим ГУИДЕД и начались проблемы.
Ткнул точку. Коптер резко и очень быстро полетел в точку.
При этом доворот носа по направлению к точке он отрабатывал в ходе движения.
Это привело к сильной раскачке и просадке по высоте.
Уже в точке его начало бросать из стороны в сторону с поворотом по yaw по часовой стрелке.
Включил режим стаб, отловил его, вернул к себе, посадил, дизармил и отключил батарею.
Краша не случилось.
После этого все попытки взлететь приводили к крену на левый борт и кручению по yaw.
В принципе он взлетал и летал, но с постоянной коррекцией вручную.
Анализ логов показал, что в момент включения режима гуидед, yaw спрыгнул на 50 единиц в плюс.
Обратно не возвращается.
Собственно вопросы.
Что могло произойти? Куда смотреть? Что делать?
Приходит в голову одно — перепрошить и настроить по новой.
В логах вы увидели, что сигнал с аппаратуры сдвинулся на 50 единиц? Может с аппаратурой что случилось? Хотя это не должно было влиять на режим Guided, т.к. там работает как бы и Loiter и Auto. Если прошивка свежая (точно больше 3.1-rc5), то это должно быть учтено, хотя на режиме Guided не известно как будет работать. А то, что теперь он летит с креном и кручением, так же похоже на аппаратуру.
Попробуйте сначала сбросить настройки на аппаратуре, выставить все тримеры/субтримеры в 0, а расходами/лимитами добиться сигнала в районе 1100-1900. Заново откалибровать аппаратуру в MP. Если не поможет, то проще сделать очистку EEPROM (setup erase/setup reset для старых прошивок, кнопка Reset в Full parameter list для новых), а затем все заново настроить.
Спасибо за ответ!
Увидел дома на столе, что горизонт слетел на 15 градусов. Или весь гирик слетел, не понятно. Всё остальное в порядке.
Резет аппы сделал, но с ней и так было всё хорошо. Так, на всякий случай сбросил.
Перепрошил АПМ. Сделал все настройки по-новой.
Вышел в поле. Летит! В принципе, поведение то-же, что описано в первой части моего предыдущего поста.
Гуидет пока не стал проверять.
Загрубил мёртвую зону стиков аппы. Пропало подкручивание по yaw. Стик, видимо, очень жёсткий.
Завтра проверю полёт по точкам и гуидет.
Отпишусь, если интересно.
Вообще не понимаю, что могло произойти.
Пишу много, с целью добавления опыта эксплуатации APM 2.6 на очень толковый сайт.
Может кому и пригодится.
Спасибо! Наблюдал такое раз, но там контроллер оторвало после удара. На клоне фантома. Сначала откалибровали, полетел, потом корпус открыли и обнаружилось. Поставили на место, откалибровали, летит. Ждем ваш результат!
Сегодня проверил полётные режимы.
Сначала отправил коптер на миссию. Из режима «лоитер».
При включении режима «авто» коптер сделал резкий пируэт с сильной раскачкой (типа «обруч») и просел по высоте, потом выровнялся, набрал заданную высоту и полетел на первую точку.
Дальше все прошло гладко по заданной миссии.
Повторил задание. Пируэта больше не было.
Поменял батарею, повторил. Следующую батарею, повторил. Больше выкрутасов не повторялось!
Потом из «лоитера» отправил на точку, ткнув в экран (режим «гуидед»).
Коптер повторил тот же пируэт!
Ткнул следующую точку, потом другую — всё ровненько и гладенько!
Горизонт при этом не слетел как в прошлый раз.
Делаю вывод: после перепрошивки и начальной настройки АПМ при первом включении какого-либо режима возможны глюки системы стабилизации!
Это у меня только так?
И ещё пара наблюдений.
В режиме «стаб» дёргается луч 3-4. Особенно при увеличении газа. При переходе в «альтхолд» или «лоитер» всё ровно и плавно. Кто знает почему?
При переключении батарей заметил, что на одной из трёх у коптера «плывёт» yaw по часовой стрелке. Ток достаточный она не выдаёт чтоли? Какому-то мотору не хватает? (Батареи одинаковые)
И ещё сегодня был притно удивлён, когда коптер держал точку как прибитый при 7 спутниках и 2,7 hdop. Кстати и по точкам летал точно. (Проверка gps при преарме отключена)
Ну как-то так. Всем приятных полётов!
Не должно быть пируэтов никаких. Не должно быть глюков при первом переключении режима. Из-за плохих батарей не наблюдал дерганья лучей. Если дергается при увеличении газа, то похоже что-то на проблему с синхронизацией, либо с вибрациями. А проверку GPS на преарме лучше то включить.
А что это за синхронизация такая? Где на неё посмотреть и как проверить?
Калибровка регулей сделана, если Вы про неё.
Виброразвязка стоит и поролон ещё проложен между пластинами.
Всё по фэншую. Вибрации меньше двух единиц.
А проверку GPS я временно отключил. Знаю, что не здорово это!
В моих краях Hdop ниже двух единиц один раз в неделю бывает.
А летать-то хоца!
По синхронизации лучше почитать темы выбора регуляторов/моторов. Либо проще однозначно залить коптерную прошивку в регулятор (SimonK, BLHeli).
Я бы не советовал делать виброразвязку с применением поролона, т.к. могут быть раскачки и пружинящий эффект, может все-таки из-за этого проблема? Вроде вибрации и меньше 2х единиц у вас, но вдруг обратное влияние появляется.
При плохом HDOP я бы просто не рекомендовал летать или летать ручками.
Регуляторы коптерные Турниджи. Хотя прошивку я перезалью.
Виброразвязка стандартная на синих резинках, но между пластинами поролон, который добавляет жёсткость.
Да ладно «не рекомендовал летать»! Хобби оно на то и хобби — сломал=сделал.
Кстати, жду сейчас раму новую и моторы получше.
Буду стоить второй аппарат!
Как решилась проблема (если решилась)?
Что делали и что стало?
Какая прошивка APM была в день «пируэтов»?
А галочки simple и super simple означают, что режим включен или возможность включения режима через 7 или 8 канал ?
Означает, что включено совместно с режимом сразу.
т.е. если я включаю simple и super simple на 8ом канале, мне галочки ставить не надо?
Совершенно верно. Либо галки у одного из шести режимов, либо опцию на отдельный тумблер. Тогда будет работать для текущего выбранного режима.
Возможно ли совместить режим Follow me c режимом Circle? И как в режиме follow me аппарат отслеживает изменение высоты местности?
По совмещению режимов лучше на форум разработчика.
Про высоту уж точно не помню, но вариантов 2: либо на той же высоте, до куда взлетели и включили Loiter, либо при включении режима планер спросит высоту (как и в режиме Guided) и дальше будет летать на ней.
Ответ для Fumo.
Ох! Много чего уже было сделано!
Сразу выводы.
1. Покупать настоящий APM-контроллер. Китайские поделки фтопку!
2. Покупать хорошие регули с качественными фильтрующими кондёрами и желательно из одной партии.
3. Прошивать все регули прошивкой СИМОНАКИРБИ.
4. Пропаивать все соединения очень тщательно (и силовые и сигнальные).
5. Организовывать питание коптера как рекомендуется на этом сайте и лучше по фэнуушуюю.
6. Не торопиться с прошивкой контроллера на новейшие прошивки. Летать на проверенных временем.
7. Поднимать компас повыше от всего электронно-электрического на борту аппарата
8. Обязательно проверить прошивку модуля GPS и протокол по которому он отдаёт данные контроллеру (в новых прошивках APM не поддерживает старый протокол). Провалов быть не должно.
9. Летать при hdop ниже 2.
10. Иметь желание, время и настроение всем этим заниматься!
Как-то так и всё летит! Даже коптер собранный из бамбуковых палок.
«Китайские поделки» — это всё, что НЕ 3DRobotics? Или HobbyKing, RCTimer, BangGood — тоже считается? ))
Первый APM я заказал на алиекспресе. Вот он-то и чудил. Только в СТАБЕ прилично летал.
Второй APM я брал у официального представителя 3drobotics, причём уже распаянный.
Он летает без нареканий.
Хотя мне не равится как на нём работает последняя прошивка. Глючная она. Иногда аппарат хочет улететь к разрабам.
Вообще их можно по цветам различать и по элементной базе.
Разницу я понял только когда попробовал оба контроллера на одном аппарате.
А в чем разница элементной базы? Какие отличия?
Вот только недавно об этом написал.
Кроме информации о стабилизаторе напряжения 3,3v, больше различий не нашел
На оригинальном приляпано всё качественней, что видно не вооружённым глазом.
Моя рецензия на «Сразу выводы.»
1. Покупать настоящий APM-контроллер. Китайские поделки фтопку! — Лучше купить 2 дешевых чем один оригинальный.
2. Покупать хорошие регули с качественными фильтрующими кондёрами и желательно из одной партии.- если собираешься профессионально гонять….
3. Прошивать все регули прошивкой СИМОНАКИРБИ.- достаточно откалибровать….
4. Пропаивать все соединения очень тщательно (и силовые и сигнальные)- все делать очень тщательно!
5. Организовывать питание коптера как рекомендуется на этом сайте и лучше по фэнуушуюю.- если повермодуль дает 5.3В его достаточно. если повер модуль выдает 5.0В либо его перенастроить либо в АПМ закоротить предохранитель и диод. вот и весь фэншуй!
6. Не торопиться с прошивкой контроллера на новейшие прошивки. Летать на проверенных временем.- резонно
7. Поднимать компас повыше от всего электронно-электрического на борту аппарата- мой стиль- ничего торчать не должно, коптер должен без проблем входить в сумку!
8. Обязательно проверить прошивку модуля GPS и протокол по которому он отдаёт данные контроллеру (в новых прошивках APM не поддерживает старый протокол).- не правда, у меня поддерживает…
9. Летать при hdop ниже 2.- только если цель висеть прибитым к одной точке….
10. Иметь желание, время и настроение всем этим заниматься!- чем больше денег тем меньше времени тратишь 🙂
Как-то так и всё летит! Даже коптер собранный из бамбуковых палок.- бамбук- очень хороший материал!
Соглашусь с написанным, только некоторые моменты не понятны в вашем изречении. То ли делать ,то ли не делать так. Но думаю, что все поймут, главное, чтобы поняли правильно.
А про GPS о каком старом протоколе речь?
Уж лучше бы Аркадий свой комментарий написал.
А то похоже на попытку оспорить, но и дельные вещи проскакивают.
Каждый сам для себя решает, что для него лучше.
А по поводу поспорить- это да, ведь в споре рождается истина. Но даже если и не продолжать спор- то просто видны два мнения, и каждый вправе выбирать….
Вот только плохо разделил утверждение и коммент- не понятно где есть что к сожалению. Ну да ладно….
да, многие вещи что написал не понятны- но к сожалению здесь нельзя править после публикации. А кто читает свою мазню до публикации? 🙂
О каком GPS протоколе речь не знаю, знаю что у меня давно купленый нео 6 со старым еще разъемом работает с последней прошивкой нормально….
У меня режимы перебираются тумблером (стоковая турнига) вот если они, к примеру, идут в порядке: stab > land > althold и мне надо переключиться из стаба в альтхольд — не будет ли аппарат пытаться сесть, так как между ними ланд?
Да, вроде надо подбирать переключение так, чтобы случайно страшного ничего не произошло.
Быстро перескочешь и он встаёт в тот режим какой надо, если конешно флип не поставил в промежутке )) а то и кувыркнется. Да всё норм будет.
Подскажите плиз у кого какие пиды в настройках и что на loiter стот п настройках …. у меня коптер летает нормально в стабе … и альтхолд .. как на лоитер переключаю немного качнётся …. и потом задаю движение …. а он начинает конкретно раскачивать …. опасно как то
На 450 раме с движками 1000kv у меня стандарт.
Лучше калибруйте компас и проверяйте наводки от силовых проводов. Рекомендую сделать compassmot.
Благодарю Вас !!! Скорей в компасе дело ….проверю ! Отпишусь !
Какие имеются ввиду прошивки? Подскажите.
http://apmcopter.ru/downloads
Тут есть те, что я проверял и из-за прошивки крашей не было. Так же имеются прошивки Алексея Козина.
Я вот сам сейчас экспериментирую и вопрос про стабильную прошивку задал в другой теме. Ответа нет.
Поподробней пожалуйста.
Помогите пожалуйста. Весь интернет обшарил, не могу найти.
Купил апм 2,6 все нормально коннектится калибруется. НО, нет ни одного полетного режима.
Т.е. я захожу в полетные режимы а там пустые ячейки. В чем проблема!?
Переустановите Mission Planner. Если не поможет, то и фреймворки.
Переустановите Mission Planner. Если не поможет, то и фреймворки.
Добавлю от себя…
Отключить ВСЕ от контроллера, прошить заново. Последней прошивкой (3.2.1 вроде) через последний Планнер, с предварительной очисткой EEPROM.
На стрелки выпадающих меню, думаю, нажимали? ))). Для чистоты эксперимента. ))).
Вобщем на ноутбуке есть полетные режимы в выпадающих меню. А вот на ББ в них пусто.
На обоих стоит Win 7 32 бита.
Непонятная ситуёвина.
И кстати переустановка MP не помогла. А вот фреймворк не пробовал.
Такая же фигня!
В версии 3.3.2 — нет полетных режимов.
А в версии 3.0.1 — не могу настроить ориентацию компаса
В версии 3.1 — есть и режимы и компас можно сориентировать.
При чем одновременно с приятелем смотрим — у него все норм, а у меня шляпа.
Удалять текущий MP, устанавливать версию постарее.
Хм, хорошо.
Но где взять версию постарее?
У меня МишнПланер обновляется каждый раз при включении.
В чем кроется сама проблема?
МишнПланер это по сути программа прошивальщик.
( наподобие AVRdude, понипрог, казаама и подобным, только с красивым и подходящим интерфейсом для работы с ЕЕПРОМом )
Когда мы заливаем новую прошивку через МишнПланер, то всего навсего изменяем содержимое FLASH памяти на микроконтроллере.
Когда изменяем настройки, то просто меняем данные в EEPROM микроконтроллера.
Почему моя версия МишнПланера не позволяет мне делать определенные манипуляции с EEPROM в зависимости от выбранной прошивки ?
Мне приятель подсказывает, что возможно МишнПланер нужно было установить от имени администратора.
Ну или ладно, я готов попробовать версию постарее.
Какую версию МишнПланера посоветуете и где её взять?
Ну и самое интересное — как отключить автообновление?
Еще где то на просторах интернета встречал, что используют версию, которая не требует подключения к интернету.
Версия постарее: http://firmware.diydrones.com/Tools/MissionPlanner/
Проблема в том, что в новых версиях бывает что-то переклинивает. А раз MP написан на всяких фреймворках, то один глюк может оказаться на другом…
MP — это комплексная программа для прошивки, настройки, задания миссии и т.д. для контроллера. Только как прошивальщик ее рассматривать нельзя.
MP позволяет делать изменения, но бывает, что что-то идет не так, как хотелось. 🙂
Установить от имени администратора — одно из верных решений. И каждый раз для обновления тоже хорошо бы так запускать. Но обычно что-то из-за самих обновлений.
Какую версию ставить — тут мнения разделяются. Лучше поставить близкую по дате к вашей прошивке. Если прошивка самая свежая, то версию MP на одну-две предыдущую от вашей текущей. Если прошивка 3.1, то MP 1.2.99 должен подойти как раз.
Обновление вроде не отключается, но недельку заставить молчать его можно, нажав «нет» при вопросе об обновлении.
Да все они способны работать без интернета…
Для обсуждения вопросов по MP на форуме есть 2 раздела:
http://forum.apmcopter.ru/forums/aq-mp-work/
http://forum.apmcopter.ru/forums/aq-mp-conn/
Спасибо большущее!
А есть ли такой полётный режим, чтобы можно было ограничить горизонтальные границы полёта. К примеру я хочу подлететь на киллометр в высоту, но не хочу чтобы в облаках его унесло ветром непойми куда? Как такое реализовать на практике, чтобы не получилось как тут
Есть такой режим. Называется GeoFence. МОжно ограничить радиус и высоту полета. При достижении «стены» коптер полетит домой в режиме Loiter. Можно перехватить управление, переключив режим и летать дальше вручную.
Добрый день. Подскажите, мой коптер в режиме loiter начинает кружить медленно с радиусом метра три. В чем может быть проблема? Еще вопрос как еще может называться полетный режим simple? Не могу найти его в последней версии mission plainer.
По удержанию позиции почитайте раздел Разбор полета, улеты, не держит позицию/высоту.
Полетный режим Simple включается так же как и по старому.

как отключить GPS модуль
Не понял суть вопроса. Проще всего выдернуть провода, так же можно отключить программно в MP (искать параметр типа «GPS type», поставить none).
Всем привет!
Друзья есть проблема с APM rover
Использую APM 2.6 с споследней прошивкой Rover2.5
Суть проблемы в удалении WP точек с пульта!
Заметил странную закономерность опишу процесс:
Включаю грузится находил 3d fix все норм ставлю точки по ним режимы выполняет
наблюдаю за всем этим делом через планер и телеметрию!
Пробую удалить WP считываю удалил заново ставит home опять назначаю несколько WP удалять и ничего только могу ставить! Если перезагружу контроллер может если повезет еще разок даст удалить! Короче бред!
В итоге мне интересно на катерах та же беда или у меня только!?
Пробовал другие прошивки 2.49 2.47 2.45 везде глючит! Грешу уже на китайский контроллер!
Случай интересный и заслуживает отдельного внимания. Прошу создать тему на форуме и будем думать.
Пока тему создать не могу нет прав! Только зарегистрировался!
Я так понимаю только у меня такая проблемма! Или все планируют миссию с внешних устройств таких как ноут планшет или приложение на телефоне! Что с пульта никто не пробовал! (
Нужно чтоб просто кто то проверил прям дома в Mission planere удаляет ли WP точки с пульта или нет! Помогите кому не сложно! Сам бы проверил но в наличии только один контроллер,а покупать второй чтоб проверить не актуально!
Если Loiter в небольшой ветер начинает чудить. Стоит в точке какой то резкий. То один лучом газонет то другим и проседает по высоте. Что такое может быть.Газ висения?
Ваш вопрос мы продолжили обсуждать на форуме.
Все работает, кроме одного момента — MP не реагирует ни на одну комбинацию стиков — что бы я не щелкал, он держит зеленый (выбранный режим) в «Mode 4», и всё… Аппу калибровал, как и всё остальное. Quanum NOVA со стоковой аппой. На переключение режимов DX-6i реагировал.
Докладываю — накосячил с подключением: нужно, чтобы стики (5-й канал приемыша) был подключен, соответственно, к 5-му каналу контроллера — именно он отвечает за полетные режимы.
Такая же фигня но все правильно подключено капец уже всю голову сломал
Нее. Это заговор!
С декабря 2018 не могу добиться на форумах, что делать ((((. Только сегодня (28.05.19) нашел.
В МП по умолчанию на полетном режиме стоит 8 канал!
меняйте переменную
MODE_CH 8 на 5 и будет счастие!
Удивлен что этого совета не было.
Перестали нормально переключаться полётные режимы. На пульте FS-I6 установил микширование на тумблеры и . Раньше всё работало как надо. Сейчас при включении тумблера не происходит переключения в средний режим, т.к. в параметрах полётных режимов стоит значение >1230,1620,<=1749 (для пятого режима). У меня же эти показатели 1200 и 1800 соответственно. Т.е. получается, что в первом случае не хватает, а во втором перебор. Обнулял до заводских настроек вбивал и настраивал всё по-новой… результат тот же…..
Без вариантов. Разбираться с аппаратурой. На форуме есть тема.
Подскажите, как на прошивке АС3.2.1 настроить «аварийный дизарм» на тумблер. Неудачно приземлился, квадр завалился на бок, винт карбоновый уперся в землю — сгорели регулятор и мотор. В МР на 8 канал опционально можно выставить «Emergency Stop Motors», но он не работает на АРМ 2.8 с прошивкой АС3.2.1, и в описании на ардупилоте написано что он на прошимка АС 3.3 и выше.
Как мне реализовать такое на старом железе? Есть варианты?
Какие настройки влияют на скорость реагирования при стабилизации? Как эту самую скорость увеличить? При незначительных порывах ветра сильно раскачивается и проседает, при резкой остановке в безветрии болтается… В руках, при наклоне вперёд, усилие на выравнивание дрона значительно больше, чем при наклоне назад. Думаю, в этом вся причина. Прошу объяснить на простом языке. Новичком назваться возраст не позволяет, а спецом знания. Спасибо!
Скажите, что нужно сделать, чтобы выполнить полет на квадрокоптере с автопилотом ardu в режиме auto (по программе).
Когда я его frnbdbhe. (arm) и включаю режим auto и затем дергаю газ , то все идет как и надо. От начала и до конца. Но я не поняимаю. как стартануть без ДУ. Я активирую аппарат от ноутбука. включаю режим AUTO, тыкаю START MISSION ….-ничего не происходит. Пробовал вообще не включать ДУ (думал, что мб если он видит ДУ, то не хочет без нее стартовать) — тоже не получается.