В данной статье расскажу, как лучше организовать питание для платы APM, чтобы исключить, в первую очередь, часто возникающие вопросы, а также чтобы все было согласно рекомендациям.
Питание платы может быть организовано несколькими способами, но каждый имеет свои преимущества и недостатки. Попытаемся разобраться в этом. Разработчик рекомендует использовать заводской Power Module, но для нас же важно сделать все лучше, проще, надежнее и дешевле. Поэтому этим модулем конечно пользоваться можно, но и с ним имеются ограничения, например максимальный ток в 90А, что не годится для коптеров с конфигурацией для резвых полетов. Датчик тока на нем плох тем, что не столь точен, имеет паразитное сопротивление. Питание идет через диод и предохранитель. По даташиту PTH08080W выдерживает максимум 18В на входе, а броски могут быть и поболее, даже на батарейке 3S, не говоря уж про 4S.
Обычно пилоты делают питание для платы APM следующими способами:
- Питание от регулятора двигателя.
- Питание от отдельного BEC.
- Питание от отдельного стабилизатора 78L05.
1) Питание первым способом самое простое и чтобы попробовать взлететь на коптере, можно этим способом воспользоваться. Недостатком является то, что нагрузка в виде контроллера APM и остальных комплектующих может оказать влияние на регулятор и он выйдет из строя. Контроллер обесточится и это спровоцирует остановку моторов, и как следствие — падение коптера. С точки зрения подключений этот способ реализовать также проще всего. Питание берем с одного регулятора, оставляя контакт +5V разъема BLS, с остальных необходимо извлечь и изолировать.
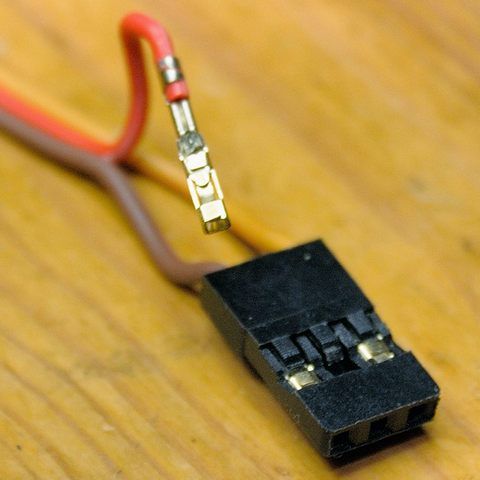
Отсоединенный контакт
Питание подается на разъем Outputs. Для того, чтобы питание поступило на контроллер необходимо установить перемычку JP1.
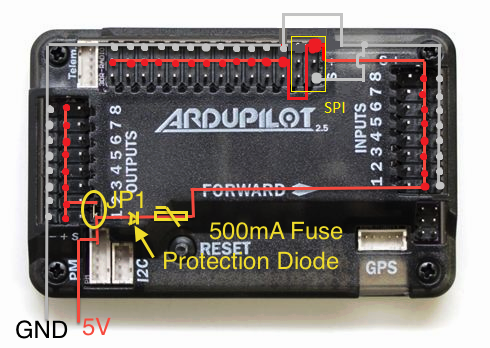
Цепи питания платы APM
При таком подключении питание идет через защитный диод, на котором падает напряжение на 0.3В. При подключенной дополнительной нагрузке напряжение может еще упасть и на контроллер Atmega2560 уже может приходить напряжение в районе 4.5В, что является минимальным. Использовать коптер с таким питанием крайне не рекомендую, иначе может случиться останов или перезагрузка контроллера и коптер упадет. Как разновидность такой схемы можно использовать 2 регулятора. Один подключаем к Inputs, другой к Outputs, а у остальных провод +5V также необходимо извлечь из колодки. Перемычку JP1 в данном случае ставить нельзя!
2) Второй способ можно организовать питанием от отдельного BEC помимо регулятора. Этот пункт является перепечаткой материала с дневника Алексея Козина.
«Импульсный регулятор напряжения именуемый UBEC на номинальных нагрузках практически не нагревается и преобразует напряжение с КПД порядка 90%, но некоторые из юбеков создают существенные помехи, другие дают выбросы при включении, выключении или резком перепаде тока нагрузки».
«Некоторые, например этот, не дают необходимую скорость нарастания импульса при включении что приводит к тому что нужно передергивать провод от юбека к APM».
«Другие при подключении USB перегружают цепь питания USB — срабатывает встроенный в APM 2.5 предохранитель».
«А вот такой в режиме 5 вольт работает вполне адекватно».
3) Питание от отдельного стабилизатора 78L05. Этот пункт является перепечаткой материала с дневника Алексея Козина.
«Самую высокую стабильность выходного напряжения обеспечивают линейные регуляторы (например на микросхеме LM7805), но их недостаток в том что все избыточное напряжение они срезают в тепло, а это не только возможный перегрев, но и неэкономное расходование энергии».
Можно использовать схему подключения двух линейных стабилизаторов 78L09 и 78L05, включенных последовательно, но это тоже не решает вопрос нагрева, даже на большом радиаторе.
4) Самый лучший вариант!
Нам необходимо избавиться от всех этих недостатков и поэтому придется использовать совместно импульсный и линейный LDO стабилизаторы. С импульсного напряжение на выходе должно быть больше 6В для корректной работы далее последовательно включенного линейного LDO стабилизатора.
Воспользовавшись материалом Алексея, я собрал этот стабилизатор и вижу очень хороший результат. Использование данного решения обосновано тем, что даже лучшие BEC, речь о которых в п.2, не могут обеспечить свою нормальную работу из-за большого входного напряжения (точнее его перепада между входом и выходом, хотя бы даже если взять 3S аккумулятор — 12.6В). А при использовании данного стабилизатора на вход можно запросто подключать 6S аккумулятор — 25.2В.
На выходе импульсного стабилизатора необходимо получить напряжение в районе 6.3В, настроив подстроечным резистором. Далее для компактности заменил его на постоянный резистор. Измерил сопротивление подстроечного — оно оказалось 1.411кОм. Близкого номинала (1.4кОм) в таблице стандартных значений нет (хотя можно найти такие резисторы), поэтому чтобы получить такое сопротивление можно соединить параллельно пары резисторов: 2 и 4,7 кОм или 2,2 и 3,9 кОм. Использовать 2.2 и 3.9 будет более предпочтительно. Добавим погрешность резисторов и как-раз можно получить требуемые 1.411кОм.

2 резистора, запаянных в параллель
При установке такой пары я получил усредненное значение 6.34В (мерил обычными китайскими мультиметрами, которые показали 6.32 и 6.36В) на выходе импульсного стабилизатора. На выходе последующего линейного LDO с нагрузкой получил 5В (4.95В и 5.04В).
Детали платы Алексея:
- D2 — диод Шоттки любой от 35В от 1А, например 1N5822 SMD.
- C5 — конденсатор 100мкф, 10В керамический (найти сложно, поэтому можно заменить электролитом)
- C7, C8 — конденсатор 100мкф, 10В электролит
- C6 — конденсатор 0,1 мкф керамический
- R3 — резистор 8.2кОм (для аккумулятора 4S), обозначение 822
- R4 — резистор 3.3кОм, обозначение 332
- IC — стабилизатор LDO в корпусе sot 223, LM2940IMP-5.0
Популярный регулятор LM1117-50 тут категорически не подойдет, он не допускает обратного питания, которое возникает при подключении USB.

Плата Алексея с LDO
Комплект можно купить у Алексея или изготовить самим по схеме.
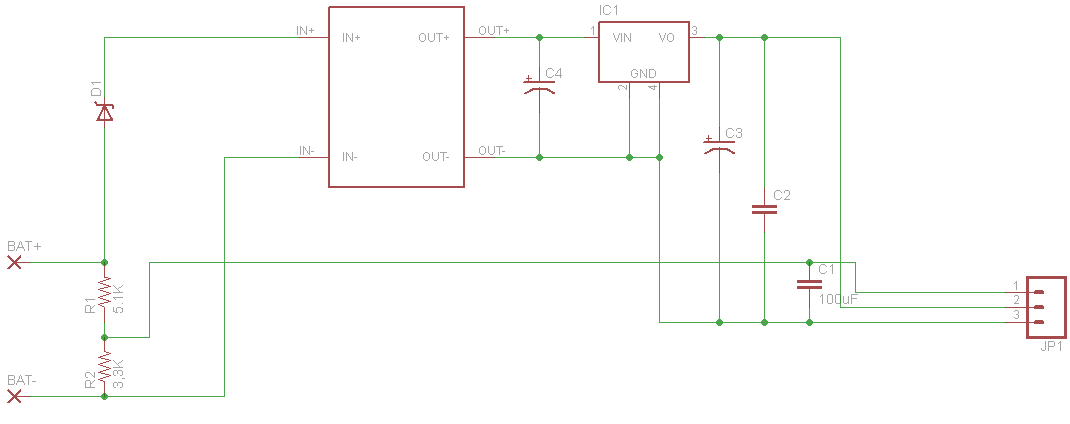
Схема стабилизатора Алексея
Элементы в соответствии со схемой:
- D1 — диод Шоттки любой от 35В от 1А, например 1N5822 SMD.
- C3, C4 — конденсатор 100мкф, 10В электролит
- C1 — конденсатор 100мкф, 10В керамический (найти сложно, поэтому можно заменить электролитом)
- C2 — конденсатор 0,1 мкф керамический
- R1 — резистор 5,1кОм (для аккумулятора 3S), 8.2кОм (для аккумулятора 4S), обозначение 512, 822
- R2 — резистор 3.3кОм, обозначение 332
- IC1 — стабилизатор LDO в корпусе sot 223, LM2940IMP-5.0
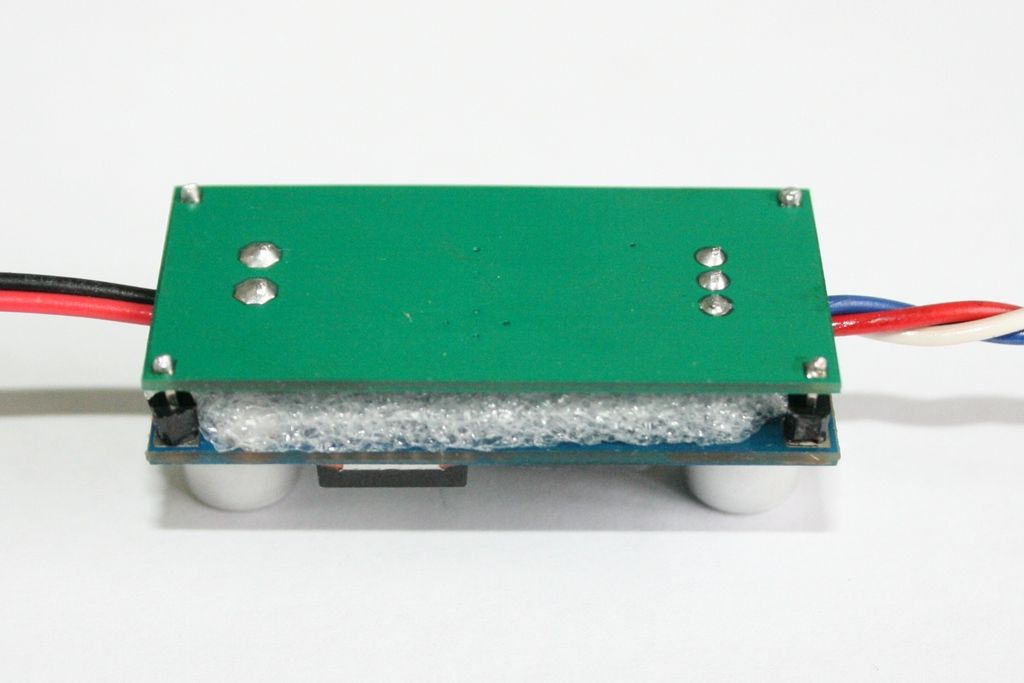
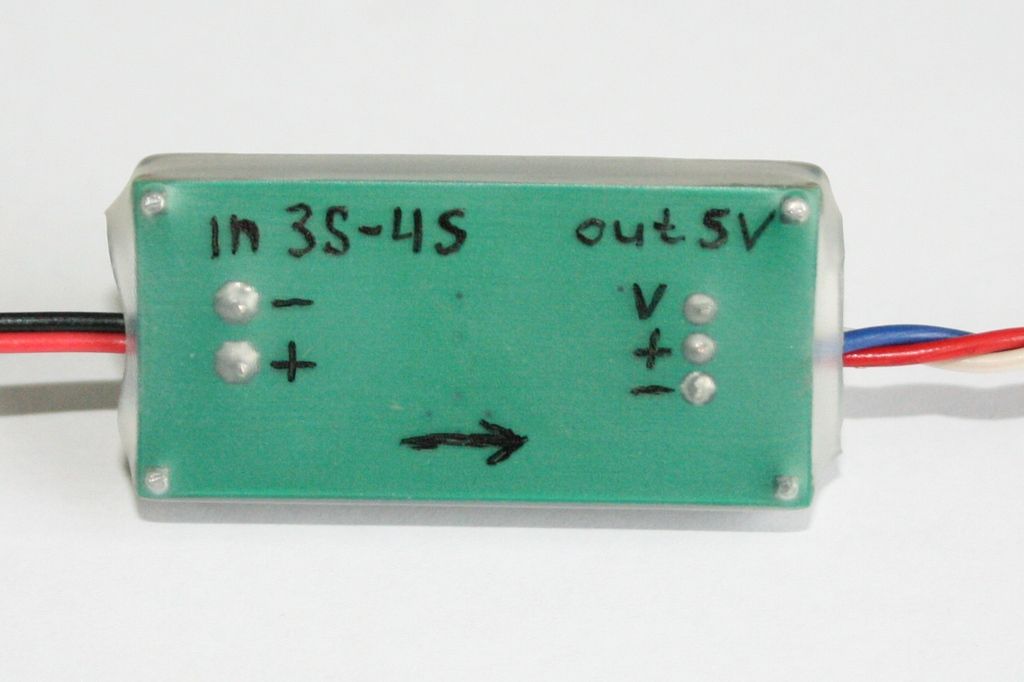
В дополнение на плате присутствует делитель напряжения на резисторах для измерения напряжения на АКБ и конденсатор для сглаживания колебаний напряжения. Настройку датчика напряжения рассмотрим позже. Пайку производим с использованием штырьков PLS по четырем углам. Правильному расположению платы соответствует размещение так, чтобы надписи совпадали (in+ подключаем к in+, in- подключаем к in-, и т.д.). Затем одел термоусадку 30мм. Получилось примерно вот так:


Подключение производим следующим образом (для обычного клона APM производим в разъем A1 (перемычку JP1 не вставляем!), для редакции платы Алексея в отдельный разъем питания):
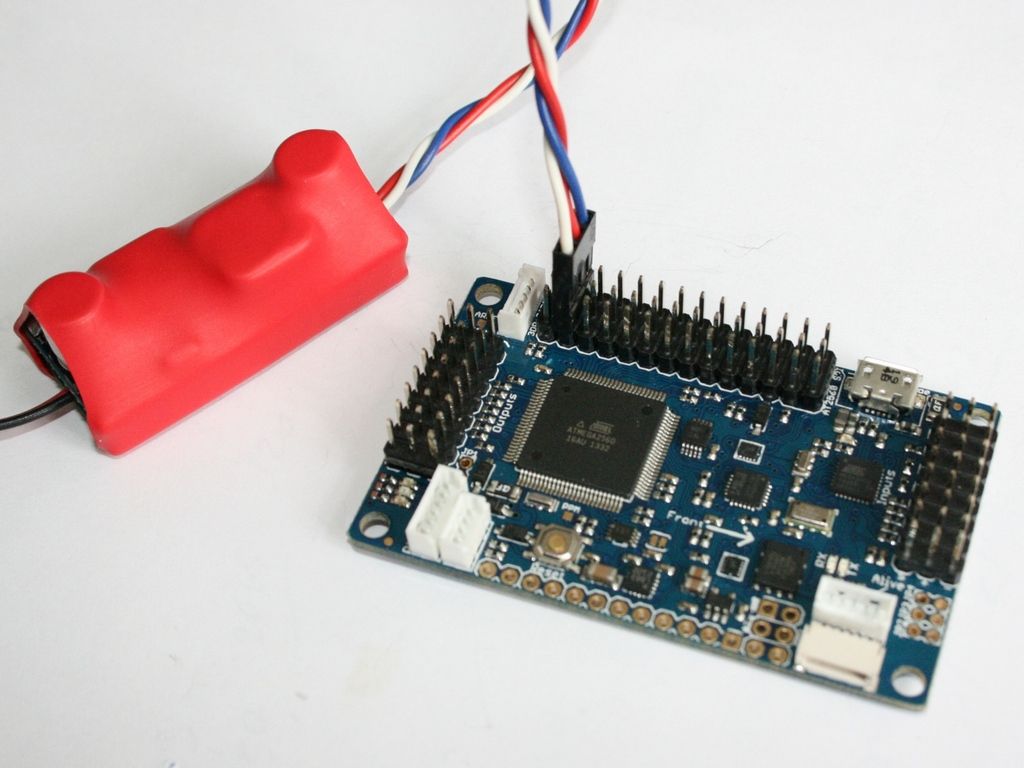
Питание к плате обычного клона
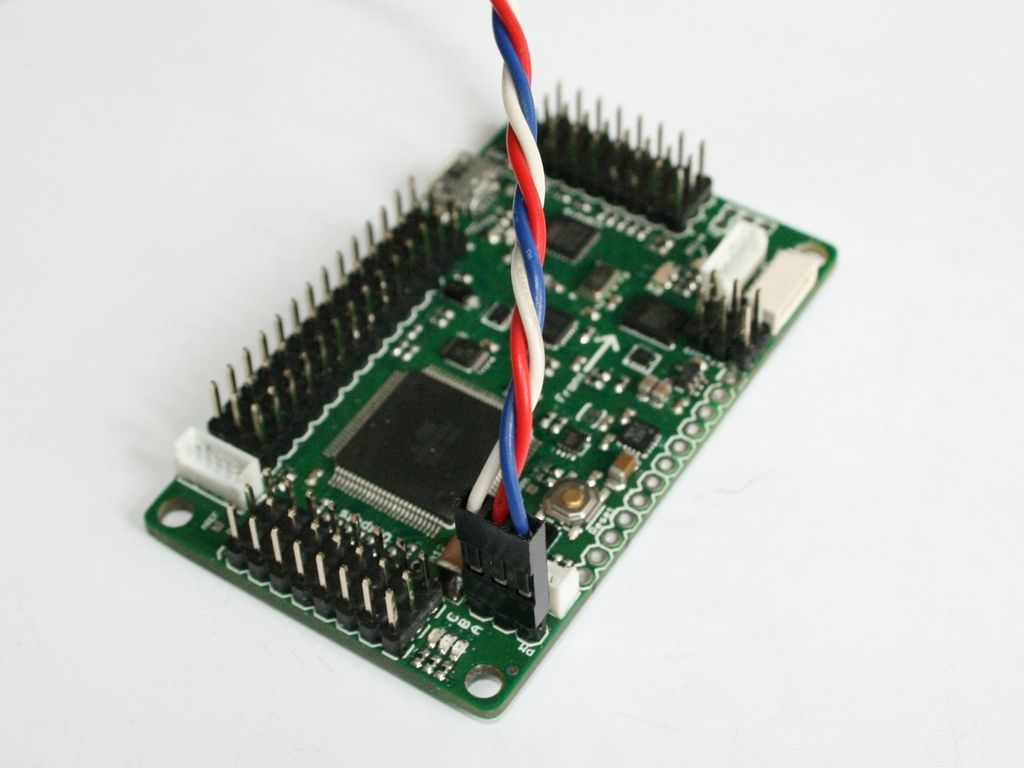
Питание к плате редакции Алексея
Цвета у меня следующие: синий — GND, красный — +5V, белый — датчик напряжения на делителе.
Теперь мы имеем наиболее правильное и стабильное питание для контроллера и всех дополнительных компонентов благодаря использованию LDO стабилизатора.
Update 17.04.2014:
Григорий Тимофеев:
Скажите, есть UBEC на 5,1 вольт 3 а, если им запитать через боковой разъем всместо powermodul, нормальный вариант, или 0,1 дело испортят?
Алексей Козин:
дело в том что и фирменный с выходом на 5.3 далеко не айс,
теряемые на диоде и предохранителе 0,3 вольта не стабильны и могут меняться в зависимости от нагрузки, иногда когда от апм начинают питать телеметрию, осд в некоторых платах срабатывает самовосстанавливающийся предохранитель и прямо в полете — обесточка. дидронесы отзывали партию апм с предохранителем (кажись на 0,4а) тем кому продавали комплект (кажись апм + телеметрия )
в более новых платах вроде бы заменили предохранитель на 0,5 — но все это «сопли»предлагаю такой тест:
точным вольтметром измеряете питание на своем апм (колодка INPUTS, туда куда включаете приемник радио) запитанном от борта при отключенном усб
4.90 — 5.00 идеально для всех случаев, 4.90 — 5.10 идеально для случаев «без осд» (5.1 это много для видеочипа)
4.80 — 4.90 — в принципе летабельно, но риск сбоя есть
ниже 4.80 — критично мало, риск сбоев велик, особенно если нет доп. фильтрующего электролитапосле того как все подключено втч осд, радиомодем даем еще 200ма или чуть больше нагрузки
(например подключив резистор 25 ом к цепи 5V ) и смотрим не упало ли напряжение
Update 18.04.2014:
Исправлена ссылка. «А вот такой в режиме 5 вольт работает вполне адекватно».
Update 10.05.2014:
При использовании отдельного BEC необходимо извлекать плюсы и минусы (хотя этот момент тоже спорный, т.к. может быть закольцовка массы и вносить дополнительные помехи — решать вам, начало спора тут) из колодок BLS регуляторов. Плюсы извлекаются для того, чтобы не было взаимного влияния выходного напряжения +5V регуляторов друг на друга. Минусы извлекаем для того, чтобы обеспечить правильное распределение массы для минимизации влияния силовой части на электронную (тоже спорный момент). Почитать об этом можно тут и тут. Если применяются регуляторы OPTO (отсутствуют BEC), то минусовые провода необходимы (для соединения с контроллером).
PS: Данный Update требует пересмотра! У меня минусовые провода используются.
Update 28.05.2014: Вместо LM2940IMP-5.0 можно применять mic39100-5.0WS (в таком же корпусе). С током в 1А практически не греется и просадки напряжения почти нет. По даташиту на вход надо подавать 5.3В, но начиная с 5.1В уже работает.
Update 28.05.2014 2: Таблица для настройки коэффициента датчика напряжения в Mission Planner.

Делитель напряжения и коэффициенты
Update 11.08.2014: Видеоматериал от Юлиана.
Юлианом предложен более простой способ запитки контроллера. Плюсом является быстрота изготовления, а из минусов, по моему мнению, то, что нет делителя для датчика напряжения и выглядит не так изящно. Думаю Юлиан не обидится на меня.
Update 22.09.2014: Видеообзор комплектующих от Алексея Козина: платы APM 2.5.2M3, модуля GPS-Глонасс MTK 3333 и блока питания.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Здравствуйте! Я пока в этом новичек, но как понял из предыдущих моих исследований, что можно использовать заводской Power Module просто в качестве датчика тока и напряжения, удалив при этом питающие провода для АРМ. Тогда если я соберу такой бутер из юбек-бек, который здесь описан, то можно и не применять резисторный делитель R1, R2, правильно?
Можно. Почему бы и нет?! 🙂 Правильно. Останется только правильно выбрать типа датчика (3DR Power Module или Non 3DR).
Спасибо! Надеюсь про то, как правильно выбрать тип датчика будет статья? 😉
Скоро не обещаю, но все возможно. Пока наполняю сайт основной информацией. Если у вас есть изыскания по этому вопросу, то могу разместить информацию.
С удовольствием поделился бы опытом практического использования, настройки и всего, что связано с АРМ, но в теме коптеростроения совсем недавно (пока обзавёлся лишь АРМ 2.6 и телеметрией), поэтому сам пока впитываю теорию, собираю увлекательный паззл по крупицам из разных источников. Ваш сайт очень перспективный в плане «всё в одном».
Если с родного POWER MODULE сходит 5,3 вольта, то можно-ли на самой плате заменить диод и резистор на линейный стабилизатор (с конденсатором)?
Здравствуйте! Помогите советом, пожалуйста. Весь мозг уже себе сломал.
Вопрос по перемычке JP1. Уже наверное всё про неё известно, но …
Собрал коптер, подключил всё по классической схеме — питание APM подаётся с PowerModule (+5 В НЕ удалено).
В IN подключен приёмник (запитан от одного канала) и в OUT подключены регули (+5 В НЕ удалено).
При таком подключении рекомендуется JP1 удалить. Я правильно понимаю?
При удалении JP1 регули не калибруются, моторы не армятся. OUT не работает.
При установке JP1 регули калибруются, моторы армятся. OUT работает. Но получается встречное питание +5 В (от PowerModule и от регулей).
При установленной JP1 и отключенном питании +5 В на OUT (от регулей) регули не калибруются, моторы не армятся. OUT не работает.
Почему? Что я делаю не так?
Хочу сохранить питание от PowerModule + датчики тока от него. Как и почему?
Спасибо!
Сам допёр! У меня регули OPTO! С этим связано видимо.
Встречного питания НЕТ! Этим регулям самим +5 В нужно.
Возникла другая проблема. Питание в борте 4,8 В. Нужно два источника — два питания.
2 источника? Почему бы и нет. Соответственно перемычку не ставить. Из минусов — лишний вес.
Думаю, что если все нагрузки не потребляют больше 1А, то можно применить схему Алексея для питания, убрав перемычку и подав с источника плюс для запитки Inputs и Outputs.
Похоже на правду?
Да! Спасибо!
Коптер по Вашему сайту собираю!
Много чего стал понимать.
Скоро думаю полетит!
Респект и уважуха Вам!
Александр откуда инфа что 5.1 много для видеочипа?по даташиту у нее максимальное 5.25,у моей осд питается от встроенного бека,напругой 5.1 видеочип слегка теплый.
Думаю 5.1В — это результат эмпирических исследований. Если довериться даташиту, то если при 5.25В не будет греться выше 85°, то должно быть все ОК. У меня к OSD прилеплен небольшой радиатор размером с микросхему, нагрева вообще не наблюдал. Говорят, что достаточно пропаять отверстия под микросхемой и даже так отвод тепла будет лучше. Ну а если микросхема сгорела без перегрева, то и 5 или 5.1В ситуацию не исправят.
Не очень понятно по второму пункту! У меня есть SBEC на 5в, куда его втыкать и надо ли вытаскивать + из проводов на регуляторы в outputs.
Если выдает 5В, то подключать на Inputs. Перемычка в этом случае не должна стоять. А на Outputs провода от регуляторов с извлеченным плюсом, чтобы друг на друга не влияли.
Использую для питания APM 2.6 рекомендованный выше UBEC (HXT_UBEC_5_6v_output_5_5_23v) c hobbyking. перемычка на UBEC стоит на 5v, на контроллере перемычки нет. Контроллер запитываю через INPUTS. от регуляторов красный провод извлёк. Подключен ресивер turnigy и GPS совмещенный с компасом. Подключаю LIPO 3s, меряю напряжение на INPUTS = 5.31 Всё ли правильно делаю? Выше пишется что напряжение не может быть больше 5.1 Что будет если подключить MinimumOSD а в дальнейшем телеметрию и набор fpv? погорит всё?(
Очень похоже на:
Можете дополнительно поставить на выход с бека линейный стабилизатор типа 7805 и получится 5В ровно. Дальше посмотрите на просадку со всей нагрузкой. Если не будет хуже, чем 4.9В, то считаем все нормально.
При превышении напряжения, на OSD выходит из строя микросхема MAX.
В общем, собрал доп. стабилизатор, правда в магазине не было LM2940IMP в корпусе смд, пришлось ставить LM2940CT в обычном корпусе.
На выходе всего этого дела получилось ровно 5V, а при подключении к АРМ, на котором ещё висит периферия (приёмник, модуль ЖПС/компасс и радиомодем) напряжение просаживается до 4,76V. В статье написано, что ниже 4,8 риск сбоев велик, наверное, лучше запитаться просто от UBEC, он хоть 5,2V выдаёт. Всё таки интересно мнение знатоков, кто что скажет по этому поводу?
У меня нагрузка та же. Параллельно стоит конденсатор 3000мкФ. Пока вроде больше ничего от 5В не питается. У меня стабильно 4.9-4.92В сейчас. Чем использовать неизвестный UBEC, лучше наверно с 2940 сделать 5.1В и тогда с просадкой напряжение будет выше.
Кстати а какое напряжение приходит на 2940? Минимум надо 6.25, а лучше 6.35.
Еще: если не ошибаюсь, то сам APM немного занижает показания.
Самое интересное, что мультиметр на входе 2940 показывает 6,35 на выходе 5,15. Получается, что вроде бы всё по фэн-шую. Если АРМ действительно занижает показания вольтажа (в Mission Planner значение плавает от 4,73 до 4,86V, аппа стабильно показывает 4,76), то проблемы скорее всего нет, надеюсь. По крайней мере на столе весь этот «организм» работает без сбоев уже несколько часов. Думаю, может осциллографом измерить напряжение, чтоб узнать истинное значение.
Конечно лучше осциллограф, только не китайский 🙂 Померьте еще отдельно потребление каждой нагрузки. По секрету (не рекомендую!), у меня раньше все это дело питалось от одного регулятора и APM показывал худшее 4.3В, ну и ничего — летало почти год без приключений. Сейчас все-таки переделал по фен-шую.
Осцилл военпромовский С1-55, ошибиться не должен. Замеры показывают 6,8 на входе и 5,15 на выходе и это при полной нагрузке. Вот теперь ещё спокойней стало)). Значит связка из UBEC hextronic и доп. линейного стаба действительно отлично работает!
Хорошо. Теперь появляется другая головная боль — не много ли будет 5.15 для OSD.
OSD у меня ещё в пути с другой мелочёвкой — с месяцок похожу без головной боли :), а там будем посмотреть.
В голове полная каша. Как все же правильно? Подключить к апм 2.5 питание от внешнего бека и при этом повер модуль? Они одновременно будут питание давать? (Пожечь нехочеться…)ubec такой http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=3735
Не правильно включать оба. Если решили использовать повер модуль, то отдельный бек не нужен. Если хотите все-таки использовать отдельный бек, то если с него 5В, то включать на Inputs, а с повер модуля извлечь провод питания, а оставить только датчики.
Я вот провод питания извлек (крайний красный) АРМ все равно работает. Может еще какой провод убрать? Запитал от отдельного убек как в ссылке выше но запаял на нем перемычку 6в получив на выходе 6.37в и припаял ld2940ct (покупал 3 штуки все три выдавали разное напряжение выбрал наиболее близкое к 5в) прямо туда где провода выхода были. И подпоял электролит на выход и провода с колечком. Еще на всякий случай питание телеметрии взял от регулятора afro 30a. Раньше при включении телеметрии квад сходил с ума и падал был подключен правда не правильно 5,3в на шину без диода. Сейчас вроде все по феншую даже пробовал сервоприводы вешать просадки по напряжению нет совсем строго 4,95в. Смущает только повермодуль.
Вот тут распиновка разъема повер модуля.
На сервоприводы не рекомендую брать питание с источника для контроллера. Лучше от отдельного источника/регулятора.
Разобрался выходит что 5.3в там два крайних плюса и два крайних минуса. Выходит Юлиан в видео о подключении повер модуля неправильно отключил только один +? Я попробовал убрать два провода питание с повермодуля пропало ,а данные тока и вольтажа остались.
У меня все 4 ESC подключены к выходам, у всех провод +5в подключен к плате т.е. они запараллелены… это смертельно? обязательно оставлять только 1 питающий ESC?
1) Если питание контроллера идет от них, то через предохранитель придет всего 4.5В, что мало.
2) Что будет, если подключить 4 источника параллельно? Ничего хорошего, т.к. между ними будет разница потенциалов (идеального ничего нет). Будет влияние друг на друга. Лучше оставить один.
А что может выйти из строя если подключить так: не отключать 5 вольт в разъеме Power module, JP1 включен, а плата будет еще запитана через входы input 5v от TURNIGY 3A UBEC.
Подклюл так по не знанию. А теперь у меня начались проблемы с платой APM, сейчас выдает постоянно «prearm ins not healthy». Может ли выйти из строя линейный стабилизатор http://api.ning.com/files/xMCtlOLhuReaxDj7uY-V0JhOkDFHb3ODgk9vcaqXpuDTbD2lf2DxuvNFK6Y-GWyDsCSYKxYgkyhLTmzagpljrCybn1O7PG5o/APM25regulator.png?
Может выйти из строя предохранитель на плате, возможно и этот стабилизатор. Почитайте в дневнике Алексея (ссылка в п2. статьи).
ПОдскажите, а что за конденсатор добавляет Юлиан на 7:50? Это вместо того, что советуется в разделе «Пайка разъемов на плате APM» по ссылке http://apmcopter.ru/wp-content/uploads/2014/04/apm252board_myairbot_front_goodsolder-300×225.jpg
Какие у него характеристики?
Да, тоже самое.
Не знаю, какой конденсатор у Юлиана, а у меня написано в статье 220-470мкФ x 10-25В.
Я себе собрал так: использовал для питания контроллера UBEC на 5,В рекомендованный Алексеем Козиным. правда не ожидал, что он дает на выходе 5.35,В а не 5 ровно :(.
Другое дело, что я вот включил в цепь модуль питания, что бы регистрировать значение напряжения и тока. Сделал калибровку. Напряжение показывает верно. Хотел задать вопрос: у всех ли значения процентовки в мишен планере 100 и не падает пропорционально разряду с 12 до 10,6. Так как у меня в плоть до 10 вольт показывает примерно 91-95% (или я где то не то настроил?)
Что-то не совсем помню, чтобы планер показывал проценты оставшегося заряда (может конечно и ошибаюсь). А датчик тока верные показания дает?
Собственно в flight data на экране неба и земли — рядом с напряжением и текущим показанием ампер. Ну и далее в настройках самого модуля, если поставить галку MP Alert on low Battery то помимо порогового напряжения wizard спрашивает при каких процентах делать аларм.
Что касается напряжения, то показывает верно. Разумеется я делал ручную подстройку. значение процентов заряда еще отображается в дройд планере. То есть я вот наконец сформулировал вопрос: Как это показание коррелируется с напряжением АКБ?
Чтобы посчитать отданную емкость, надо сложить все мгновенные значения тока. Например, каждую секунду у нас потребление 15А. Емкость 3Ач / 15 = 0.2 часа. Другими словами, за 12 минут при постоянном токе потратится 3Ач емкости. Напряжение в расчете не участвует. А в результате получаем два предупреждения: либо напряжение просело, либо по току емкость закончилась. Наблюдать остаток емкости не эффективно при маневренных полетах, т.к. покажет, что потрачено больше. А если смотреть на напряжение, но после резких маневров оно восстанавливается и кажется, что запас еще есть.
Пожалуйста объясните, почему питание берется только от одного регулятора а из других вынимать центральный провод?
В разных источниках по разному все говорят, тот же Юлиан как то говорил и собирал с питанием от 4х…
Линейные регуляторы не любят обратное напряжение на выход, а тут получается еще сложнее, что их четыре.
Я сам так полгода летал и все нормально. Потом переделал по «фен-шую».
подскажите, если использовать стабилизатор не с lm 2596 а другой, но после него сделать тоже самое что предложил Юлиан, так подойдет?
Пойдет, почему бы и нет 🙂
Собрал питание как в видео у Юлиана. На выходе (без подключения к контроллеру) показывает 4,98. При подключении к квадру — квадр не армится (квадр пищит и светодоиды горят). Замерил напряжение — 4.4В. Отключаю GPS+компас, регуляторы, ресивер — просаживаться стало до 4,51. Не подскажете почему так?
если запитать от другого UBEC (5,25В) — стартует успешно и армится, просадки напряжения не наблюдается (даже при всей подключённой нагрузке).
Померьте токи при разных нагрузках. Наберите резисторы от 10 до 100 Ом. Измеряйте напряжение на выходе импульсного и линейного стабилизаторов и составьте табличку. Откуда сделаете вывод, что либо импульсный, либо линейный стабилизатор ток не держит. Либо APM у вас потребляет слишком много (стабилизатор 3.3В жив?). Сколько должен потреблять APM — не подскажу, такой вопрос не интересовал.
Подскажите как узнать рабочий ли стаб на 3.3? Замерил напряжение без подключения компаса на крайних двух контактах ( с края платы) SPI, там напряжение такое же как и на входе. Верно это?
Изменил напряжение с выхода импульсного стабилизатора с 6.5 (как у Юлиана) до 7,1 после CJ7805 (это точный аналог?) получаем 5.05 на выходе и просадки напряжения на контроллере пропали (везде 5.05). Корпус 7805 вроде б не греется вообще. Почитал по его характиристикам: написано напряжение должно быть от 7В, почему 6,5 рекомендуется?
Мой вариант выстаивить 7В имеет место жить?) Спасибо!
На выходе стабилизатора (+ разъема i2c) должно быть разумеется 3.3В, а не 5! Вот проблема номер раз!
Где у вас 6.5 и 7.1В? Они приходят на вход 7805? Тогда нормально. Здесь надо подать минимальное напряжение для стабильной работы 7805. Минимум на 1.5В должно быть больше, чем 5. 7.1 пойдет. ЧЕм больше напряжение на входе, тем больше надо сделать падение и как следствие — более сильный нагрев 7805. Хорошим тоном считается — обеспечить правильную его обвязку, посмотрите в даташите.
Пусть будет 7В на входе 7805, если не греется, либо греется очень слабо (~40°).
Я похоже не там замерил (в первый раз мерял SPI))) Сейчас перевернул плату снизу смотрю разъем вижу I2S, туда с лицевой стороны подключается компас (который на одной плате с GPS) и меряю на нём крайний разъем ближний к центру. На нём 3,28 — что скажете по параметрам? Рабочий стаб? На остальных разъемах I2C ближних к краю платы 0,08 0,08 0,00.
Также замерял напряжение на MISO LVL там три контакта 3V3 и 5V получаем 0,10 2,53 2,53
Это что за значения? Спасибо!
И ещё один вопрос, сейчас если подключить через USB к компу (без UBEC конечно) квадр армится успешно и моторы стартуют.
Если подключаю UBEC — в первые 15 секунд если заармить — моторы закрутятся, вращаются примерно 7-10 секунд и затихают. После этого если пробовать армить — не проходит, т.е. попытки есть и моторы чуть-чуть шевелятся но не запускаются(((
Подскажите в чем может быть причина?
По стабилизатору и разъему i2c похоже все у вас хорошо.
Смысл мерить ноги ISP (там, про что написали MISO)? Даже не интересовался, как оно должно быть. На одной должно быть 5В, другие не интересны. В режиме прошивки и работы на — тех ногах может быть все, что угодно.
Про моторы не понял. Т.е. питание на контроллер подается от USB, а на моторы отдельно приходит напряжение? Попробуйте еще как дополнить / по другому сформулировать. не видел такого ни разу, если все так и есть, как написано. Что при этом пишет MP на экране? Ошибки не рисует? Попробуйте еще посмотреть логи, может там что увидите.
Подключаю контроллер к компу через USB (меряю напругу на INPUTS и вижу 4.45В ), в MissionPalner загружается и всё без ошибок стартует. При этом квадр собран (моторы подключены к регуляторам а они соответственно к разводке питания и аккумулятору). Делаем с аппы АРМИНГ — моторы начинают вращаться, вращаются пока не сделать дизарм. ПОвторно также можно заармить и всё крутится.
Если отключаю usb и подключаю ubec — (пробовал даже просто запитаться с импульсного стабилизатора который используется выше, выставлял различные напряжения от 4,4 до 5,2) всё также: если сразу после загрузки контроллера (в течении 10-15 секунд) сделать арминг — квадр начинает крутить моторы, и через 7-10 секунд останавливается. Более он не может запустить моторы — попытки есть, но безуспешные (чуть дрыгаются моторы)…
Вообщем понять не могу почему так.. Может будут умные мысли, напишите пожалуйста…
Похоже вам придется отказаться от идеи использовать этот BEC. Я думаю, что косяк в нем. Ищите ему замену, а пока для простоты попробуйте, как будет работать с одним 7805.
А можно запитаться от такой штуки?
NSD15-12S5
http://www.mean-well.ru/catalog/meanwell-dcdc/pcbmount/view-550.html
Если импульсный, то не стоит. Если после него ставить LDO, то 5В маловато.
Имелось ввиду отдельно. На вход батарею, на выход сразу контроллер.
Заказал из поднебесной вот такие ( https://yadi.sk/i/OWYpwL9BdAJjZ , https://yadi.sk/i/y22FA7m3dAJkS ) стабилизаторы на LM2596S с регулировкой выходного напряжения и индикатором вольтажа. Кнопкой на плате можно выбирать, что будет показывать экранчик — входное U (об этом режиме сигнализирует светодиод) / выходное U или поочередный показ того и другого.
Спецификация:
Input Voltage: DC 4.5-27V
Output Voltage: DC 1.3V-25V (step-down mode, the input voltage must be 2V higher than the output voltage)
Output Current: 1.5A
Output power: 15W maximum
Ripple Frequency: About 150Khz
Ripple Peak: About 100mV
Dimensions: 62 x 26 x 14 mm
Voltage Meter Accuracy: ± (5 ‰ +1 digit)
Static power consumption: Typical about 20mA
Дисплей можно встретить красного, зелёного или синего цветов. Замерял цифровиком напряжение на выходе — всё совпадает с показометром стабилизатора (либо врут оба, как вариант 🙂 ). В общем, считаю такое решение хорошей альтернативой бутерброду из УБЕК-БЕК, с точной регулировкой, да ещё и с наглядной индикацией вдобавок. Буду ставить один такой стаб на АРМ и его свиту, второй на видеолинк.
Остальное все то же самое. Только с Вольт-метром. И посадочные места контактов входа/выхода те же.
Почитав инфу и сделав кое-какие замеры прихожу к выводу что единственная функция перемычки — это разганичить питание между самим АРМ со всей переферией (датчики и т.д.) и выходными контактами OUTPUT. Я правильно понимаю?
Все верно. На схеме нарисовано так же.
Комментарий-вопрос к видео Юлиана. А питание на этот получившийся линейно-импульсный стабилизатор как подавать? Можно припаять вход к плате распределения питания (где припаиваются контакты для XT60 , рама HJ 450 )? Питания на регуляторах в таком случае не будет проседать? (просьба сильно не пинать, просто видео для новичков, а это не разжевано =( )
Нет, не будет проседать, не беспокойтесь. Потребление стабилизатора, по сравнению с регуляторами, пренебрежительно мало, так что смело паяйте на плату и будет вам счастье. 🙂
ЗЫ: У самого именно так и сделано.
А можете показать на фотографии как организована вся проводка на квадрике у Вас. Буду очень благодарен если в макросъёмке пришлёте пару фотографий именно с подключённым ко всему апм. holymasster@gmail.com
Спасибо заранее.
У меня самодельная рама 500-го размера. Чтобы сфоткать плату разводки и организацию проводки надо разобрать раму — этого сейчас делать нет желания. 😉
Да и толку? Если у вас HJ450 — то по ее компоновке куча картинок и видео в инете. А мой самопал, который я пилил под свои нужды — кому он интересен, кроме меня? 🙂
А если я питаюсб от Power модуля, и использую esc opto, в этом случае мне нужен JP1?
Питаясь от штатного повермодуля подразумевается, что на Outputs ничего не должно идти. Перемычка должна быть снята. Там более там диод должен стоять, который не пропустит ток.
Тут я видимо не совсем корректно сформулировал вопрос. Надо ли на регули серии OPTO подавать +5V? Где-то на сайте читал на OPTO нужно оставлять минусовой кабель.
Здравствуйте.
Планирую собрать бутерброд из импульсника + линейного, но:
1) Из импульсного в наличие только 2 платы на RT8272 — http://www.eachbuyer.com/4-75-24v-to-0-92-15v-boost-buck-voltage-step-down-converter-regulator-p238225.html, даташит http://www.aas.com.tw/knowledge_base/power_stepdown_conterter.pdf
Максимальная мощность — 10 Вт, что в расчете на 5 В напряжения получается 2 А. Тут, по идее, проблем нет, так ведь?
2) По какому параметру в даташите понять допускает ли линейный стабилизатор обратное питание? LM2940IMP нет возможности приобрести.
С уважением, Максим.
Добрый вечер, Максим.
1. Думаю, что проблем с этим стабилизатором быть не должно. Посчитайте, сколько ваша нагрузка будет потреблять, ну и попробовать длительное испытание на нагрев с увеличенным током на запас. Посмотреть на линейность просадки напряжения и нагрев катушки индуктивности. А разве 10/5=3? Да и в даташите я не увидел 10Вт, а китаец может написать все, что угодно. Если ток с вашей нагрузкой не превышает 1А, то провести испытание на 1.5А.
2. Не подскажу…
Спасибо за ответ. Нагрузка в целом не превышает 500 мА, пока нет ни OSD, ни видеопередатчика.
Хочу организовать питание на этой же плате. По сему хотел узнать у Максима каков результат? Получилось запитать от http://www.eachbuyer.com/4-75-24v-to-0-92-15v-boost-buck-voltage-step-down-converter-regulator-p238225.html ?
а на какой максимальной частоте работает 1117?
«он не допускает обратного питания» чего чего это как??
можно поподробнее про это узнать?
Подскажите пожалуйста, хватит ли провода 12AWG для питания коптера с EMAX MT3506 KV650 моторами, 1150 винтами, телеметрией, OSD и FPV? С аккумулятора выходит 10AWG, но не могу нигде найти в городе у нас такой провод, только 12AWG.
Здравствуйте, уважаемые форумчане.
Почитав немало форумов и посмотрев столько же видео, я потихоньку начал собирать свой аппарат. Так как я ещё на стадии проектирования квадрокоптера, по неопытности заказал в Китае PM, то сейчас не хочу радикально менять концепцию питания. Я решил использовать его, как питающий мой APM 2.8.
Как и говорилось, он прекрасно справляется с нагрузкой в виде самого APM + GPS + компас. Аппарат летал, настраивался AutoTun’ом, пока я не подключил OSD и телеметрию. Тут и начались «интересные» сальто без причин, был фэйлсейв по питанию, во время очередного AutoTune. В итоге я решил переделывать питание дополнительных устройств. Как самый бюджетный вариант выхода из моей ситуации, планирую запитать отдельно свои OSD и 3DR Telemetry от DC-DC конвертера на MP1584EN, заказывал здесь: http://www.ebay.com/itm/Mini-3A-DC-DC-Converter-Adjustable-Step-down-Power-Supply-Module-replace-LM2596s-/261328784505?pt=LH_DefaultDomain_0&hash=item3cd868cc79. По моему мнению, это вполне приемлемый вариант в моём случае – не надо дополнительно тратиться на покупку UBEC+BEC. Проверить свои умозаключения я не могу, так как жду из Китая новый ESC, на смену сгоревшему…
Что скажете по этому поводу? Может я ошибаюсь?
Здесь мнения разделяются. Кто-то говорит, что плохо питать контроллеры импульсными блоками, кто-то говорит, что нормально. Я бы к этой платке, из самый простых вариантов, добавил тот же линейный стабилизатор 7805.
Спасибо за совет, думаю так и поступлю, если по логам обнаружу какие-нибудь провалы, ниже 0.2в.
Планирую повесить по питанию кондёр. Но вот вопрос: на плате APM2.5-2.6 есть технологические отверстия, куда можно припаять ёмкость. На моей же плате (APM2.8) таких нет… Так ли критично то место, куда его ставить? По идее, главное, что бы он в цепи был. Или тут уже идут в расчёт законы высокочастотной техники, где решающее значение имеет взаиморасположение деталей?
Думаю, ВЧ тут не причем. Тут важнее устанавливать конденсатор ближе к потребителю, чтобы потери в проводниках были минимальными.
сделал именно на этом модуле (MP1584EN) + 7805. выходное напряжение с модуля установил 7,5 В. на выходе сборки 5,01 В под нагрузкой. размер получился в 2 раза меньше и в 2 раза легче чем на сборке варианта Алексея Козина. пока никаких недостатков не вижу.
Сорри за оффтоп, скинь плиз свой емаил. modulx dog ya точка ru
Очень много запутанного и непонятного для меня как новичка, скоро собирать коптер. Бывает что посты и ответы здесь противоречат видео от Юлиана и посты на других ресурсах.
1) Тут был пост, что подбирают к LM2596 разные резисторы вместо потенциометра (для надежности) в зависимости от батареи 4S или 3S. Но у меня когда я выставил 6.7 волта, в независимости от входного от 10 вольт до 16 вольт напряжение на выходе равно 6.7 вольта +-0.02 Что-то не так?
2) Если у меня APM 2.8 и я использую схему с LM2596+L7805CV — еще раз куда втыкать питание? И что делать с перемычкой.
3) От регуляторов идет тройной провод к контроллеру я правильно понимаю что везде нужно удалить красный провод питания? У всех четырех? (если подключаю через LM2596+L7805CV)
4) Как быть при питании от LM2596+L7805CV c подключением к USB? Ничего не сгорит? Двойное питание получается.
5) Так и не понял как питать телеметрию MinimOsd: если питать его не от контроллера, а от допустим такого же второго фэншуя LM2595+L7805CV = Значит нужно опять удалить красный провод идущий от MinimOsd с кололдки?
6) Чем плохо иметь вторую батарею допустим на 3S 2000mAh для отдельного питания телеметрии, подвеса, приемника, светодиодных огней итд? Лишний вес? Невозможность контроллировать разряд?
Спасибо!
Все прекрасно. Какие могут быть противоречия? 🙂
Не знаю, что там намудрили в нем. Я бы подключил 5В на Inputs.
Да.
Не рекомендую так включаться. Для настройки лучше использовать телеметрию.
Про питание OSD ваш вопрос не понял. Ну подаете ровно 5В и все.
Про вторую батарею согласен, что ее не надо. На потребление основной батареи мало что получится выгадать (ну пусть 10 секунд полетного времени), а вот таскать вторую не хорошо. Лучше вторую использовать для подвеса камеры.
4) Как быть при питании от LM2596+L7805CV c подключением к USB? Ничего не сгорит? Двойное питание получается.
Столкнулся с такой же проблемой. Телеметрии нет, можно подключать?
Подскажите маркировку АПМ стабилизатора на 3.3в?
Могу временно сдуть с мультивия-подойдёт?
Ответы есть в статье Проблема стабилизатора напряжения 3.3В.
Пойдет или нет — сверять даташиты.
приобрёл miniAPM. Настройка остановилась на этапе altHold. При включении режима резко набирает высоту на 2,5-3 метра, потом снижается и всё это при агрессивном дёргании газа.
Вибрации в норме. PIDs настроены. Грешу на питание. Питание шло одновременно с Power модуля и регуля. На регуле линейный стабилизатор.
Мониторил поведение показаний баро датчика через Mission planer. Высота постоянно растёт. При арминге показания обнуляются и снова продолжают расти.
Про поролонку ничего не сказано. Она есть и сложена в 2 слоя? Покажите логи. Не помню, чтобы из-за питания были проблемы с бародатчиком. Стабилизатор 3.3В в норме?
Напряжение на баро 3,44v
Решил скачать лог и вот что увидел(
http://cs622417.vk.me/v622417272/4c71a/b5zxXabWhmo.jpg
в качестве воздушного фильтра использую салфетку для протирки оптики
надо мудрить над виброразвязкой
Эге! Я делал вот по этой схеме:http://copter.ardupilot.com/wiki/initial-setup/assembly-instructions/vibration-damping/#bulb_damper_ear_plug_05g_ultra_low_vibration_mount
Получилось вот так: http://i008.radikal.ru/1505/8f/7868b9d1af07.jpg
только не смотрите на нагромаждение. это уже разобрано.
Итог: вибрации (при mpu6 filter = 40) меньше 0,3g. почти ровная линяя 🙂 ну т.е. без травы.
raefa опиши пожайлуста подробнее как настраивать датчик напряжения(как в статье,из двух резисторов) в мишн планере
Спасибо, будет!
Недавно попала в руки вот такая штуковина. Хочу ее приспособить на питание MinimOSD. Резисторы поменял, замерил тестером: ровно 5 в. Причем пофигу ей, что на входе. Самое интересное, размер и вес стабилизатора.
Еще я не понял про перемычку. У меня APM 2.8. Питание контроллера от PM. Надо ли мне убирать перемычку? Еще от всех регулей подключены все провода. Надо ли при этом у регуляторов убирать «+»?
Ну надо выбрать. Либо питать от PM, тогда перемычку убрать и вынуть все плюсы с регулей, либо от одного регуля (из остальных вынуть плюсовой провод и отключить PM — тогда перемычку поставить.
Сегодня вечером в поле отлетал 2 аккумулятора по 15минут, все было отлично, при удалении на 150метром от места взлета мой квадрокоптер сам возвращается на точку взлета, летал как профи) гонялся за чайками… через два часа в городе зарядив аккумулятор на спортивной площадке взлетел и на удалении 30 метров от пульта у коптера отключились винты,я поднял полный газ еле еле у земли он завелся и выровнялся, через пять минут, произошло такое же, пока выравнивал его, подбежал ближе, но он не слушаясь отключил вины и пал на асфальт…..
что может быть? Питание или помехи в городе на сигнал?
Покажите логи. Лучше в соответствующую тему на форуме.
Привет! У меня получилась такая ситуация… Запитался по схеме Юлиана, вынув 2 провода с разъема ПаверМодуля (у брал +5v), но в мссион-планере замер ампер стал показывать-0, т.е. получилась некая зависимость проводов павермодуля 5в и измерением тока. Вольтаж показывает. Может ли что0то в конфигурации отличаться от нормы (APM 2.6 c PM в качестве дачтика V/A, стаб на LM2596+L7805CV )?
из пауэр-модуля надо убирать только один провод +5V. все остальные провода участвуют в измерении напряжения и тока
Там 2 провода +5v. Если убрать только один, то питание контроллера остается через второй провод. Так же об этом можно прочитать в коментариях к http://www.youtube.com/watch?v=QnxEXZ9stss. Поэтому и возник вопрос как быть…
честно говоря, впервые слышу, чтобы от пауэр-модуля шло аж два провода +5в, да и в видео Юлиан отсоединяет только один(!) крайний провод http://www.youtube.com/watch?v=0Np53SHQ31g
Источник (http://copter.ardupilot.com/wiki/common-measuring-battery-voltage-and-current-consumption-with-apm/): the pin mapping from the image shown above from left to right is GND, GND, Voltage measurement, Current measurement, 5V, 5V.
Коментарии по видео Юлиана:
Андрей Виноградов 8 месяцев назад
Советую обратить ВНИМАНИЕ на то,что «GND» и «+5В.» могут идти на контроллер с PM по двум проводкам каждый.(во всяком случае у меня так было) на АРМ 2.6.
А на видео только один проводок убрали.
RC School models 8 месяцев назад
Да по двум проводам есть 5 вольт,но второй провод АРМ не запитает,это сенсорные 5 вольт…
Андрей Виноградов 8 месяцев назад
Еще и как запитает.Они на плате запараллелены.У меня так.
RC School models 8 месяцев назад
Значит это еще раз доказывает что за китайцами нужен глаз да глаз…
ну хорошо, тогда могу предложить просто сдуть микросхему стабилизатора с повер-модуля и вернуть второй проводок в шлейф и все данные пойдут как надо
А где эта микросхема?
Вытащив 1 единственный краный провод из PM
подключил к апм 2.8 и Апм включился.
Подтверждаю. В родной плате 2.5.2/2.6 на разъем идет 2 провода +5В. Можете сами убедиться, посмотрев схему.
Хочу поделиться знаниями…
Подключал питание по феншую, все как у Юлиана и не заработало…
Причина в том, что не на все боковые контакты пожно подавать питание в результате все заработало с подачей питания на контакт «А..»
как правило на контакты A1 нужно цеплять.
А вы случайно не на ISP разъем подключали питание???
Нет, на ISP не припаяны коннекторы. Подключал на первые, соседний разем от ISP. В результате на всей шине питания появлялось 3,… вольта.
Есть еще проблемка у меня одна с датчиком напряжения батареи по схеме в этом посте. После арминга на земле, миссион планер показывает правильное напряжение, например, 12.3 вольта. После взлета и повисев с проминуты-минуту, показывает приличную просадку напряжения батаери- индикатор измерений APM, около 10.8 вольт. Далее, не успев завершить автотюн, постепенно уходит до 10 вольт и ниже. В результате failsave по low battery. Однако бортовая пищалка, настроенная на 10.5в молчит, ни разу не пискнула…
Есть ли какие нибудь еще варианты измерения напряжения батареи?
Вариантов не много.
Со всеми аккумуляторами такое? Пищалка заведомо исправна/другая ставилась? Хорошо бы сравнить показания с нормальным мультиметром. Сверяйтесь и жду более детальные данные.
Если после взлета показывает 10.8В, то это может и не очень хорошо. Линейность должна быть на участке 11.1-10.8В (т.е. 3.7-3.6В на банку). Ниже 10.5 я бы не рекомендовал разряжать, чтобы иметь чуть запас на посадку.
Добрый день!
Что Вы можете сказать о питании APM через вот такой модуль?
Доброго всем дня.
В электронике не силен, но паяльник в руках держать умею, очень бы хотелось собрать описанный в статье стабилизатор. Но дело в том что в статье указана схема (http://apmcopter.ru/wp-content/uploads/2014/04/scheme-300×118.png) , не могли бы вы дать печатную схему, т.к сам я не смогу ее развести. Огромное спасибо.
Стас, добрый день! Поищите на сайтах Алексея Козина. Там было в каком-то формате.
Я был бы вам очень благодарен если бы вы направили сылочкой, я честно перерыл сайт в поисках но так ничего и не нашел. спасибо.
Всё есть тут http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/powersource
Есть то есть, но тут другая не много схема приведена. Даже компоненты другие.
Спасибо Вам большое за помощь, я действительно встречал этот материал но меня смущает то что там нет диода (http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/powersource/UBECLDOPSB.gif?attredirects=0) а в этой статье он описан, это как можно понять?
Это диод для защиты от случайной переполюсовки — можно не ставить, если уверены в своей внимательности и не допустите такого, но желательно следовать схеме и самостоятельно предусмотреть место для установки данного диода.
Огромное спасибо за разъяснение, возник у меня еще один вопрос, в этой статье http://hobby.msdatabase.ru/project-updates/theresultsofoursurvey/powersource где на печатной плате нет диода, подключают UBEC который на выходе имеет 6в. на диоде происходит падение на 0.3 вольта и получается что уже у нас не 6 вольт а 5.7 может по этой причине этот диод не был включен в схему? В данной статье мы подстроечным резистором настраиваем на 6.3 вольта видимо как раз по той причине что на диоде провалится 0.3 вольта.. я скорее всего ошибаюсь, но если вам не сложно могли бы вы прокомментировать это как нибудь? спасибо.
Конечно ошибаетесь, ведь диод установлен между аккумом и всем бутербродом, поэтому падение будет лишь на входе UBEC, на выходе останутся всё те же 6,3В.
Спасибо Вам большое. только еще один вопрос. разве на выходе у UBEC 6.3 вольта? там стоит перемычка 5 и 6 вольт. 6.3 вольта на выходе у импульсного стабилизатора который указан в этой статье. (выход в 6.3в настроен здесь подстроечным резистором) в статье же Алексея Козина используется UBEC у которого на выходе 6в…. Спасибо за ваше терпение.
А, да это я, так сказать, для примера. Потому что для входа линейного стаба не так принципиально какой вольтаж на него подадут, главное чтобы он был в пределах допустимого по верхнему значению и не ниже 6В, в данном случае.
Я читал что линейному стабилизатору становится не очень хорошо если ему давать меньше 6 вольт напряжения, поэтому я написал выше что Алексей Козин в своей статье на его сайте поставил UBEC и в печатной плате опустил диод т.к на нем потеряется 0.3 вольта что не допустимо для линейного стабилизатора, в этой же статье используется другой импульсный стабилизатор у которого 6.3 вольта и в данной схеме диод включен т.к на выходе будет 6 вольт что допустимо для линейного стабилизатора. Я хотел бы собрать схему которая указана на этом сайте в этой статье, но к ней нет печатной платы… спасибо
Диод на входе никак не влияет на напряжение UBECа на выходе
Скажите, а под 2S такой модуль можно модифицировать?
Не очень хорошо. Если акк заряжен, то 8.2 — 7.4В еще хватит для работы, если акк разряжен (6В), то уже маловероятно. Так же придется поменять резисторы на делителе для правильного измерения напряжения, либо поправить коэффициенты, но показания будут грубыми.
тогда под 2s лучше будет от ESC запитаться?
В результате краша оторвалось 2 элемента от Power Module стандартного. Кто может подсказать, что там было, а то схемы читать не умеем , eagle тоже нет. Вот фото, отсутствующее обведено на фото
Уточнение. Это клон какой-то, а не стандартный powermodule
Как можно контролировать напряжение с двух аккумуляторов на апм? Первый силовой, второй для питания все остальной электроники.
На сколько известно, такой возможности нет.
Приветствую всех! Спасибо за титанический труд над статьёй и за обсуждения в комментах…. Почерпнул много полезной инфы, но т.к. в электронике не силен, вопросы все же появились: 1. Вот если у меня питание организовано через регулятор, то нужно удалить все плюсовые провода, оставив только плюс с этого одного регуля — наверно правильно, у меня сейчас так и работает, а ПМ выполняет функцию датчика тока. Верно это? 2.Если я соберу приблуду на LM 2596 как у Юлиана, то (извините если не корректно)провода питания которые приходили на распределительную плату квадрокоптера от повер модуля нужно убрать?… 3. И вопрос с перемычкой в контроллере не ясен в случае питания по фэншую, ее снимать (сейчас в моем случае она стоит и все работает)? Извините если совсем тупые вопросы. Разжуйте пожалуйста еще раз, для особо одаренных 🙂 Заранее спасибо!
Добрый день! Спасибо!
1. Такой вариант имеет право на существование.
2. В данном случае происходит замена источника питание, т.е. вместо бека регулятора работает отдельный источник. А что у вас на распред. плате? 11.1В или что-то другое? Дайте ссылку.
3. По фен шую — снимать, т.к. напряжение питания поступает на Inputs в этом случае. Но если стоит, то обязательно убрать плюсовые провода регуляторов на Outputs и другое питание туда не подавать.
Добрый день. Подскажите какие настроки нужно делать в mission planner при подключении ПМ от Козина в разьем А1?
BATT_AMP_OFFSET,2.5
BATT_AMP_PERVOLT,25
BATT_CURR_PIN,2
BATT_MONITOR,3
BATT_VOLT_MULT,3.56
BATT_VOLT_PIN,13
Здравствуйте!
Скажите а как запитать моторы которые на 12в или на APM уже есть 12в на Outputs? У меня DJI 2212 920kv. Может можно сделать разветвление от батареи?
Заранее благодарю.
Забыл сказать что у меня квадрик Diatone White Sheep с PCB платой и там есть типа BEC’а. Вот ссылка на него и на этот BEC: http://goo.gl/fhZ5do и http://goo.gl/2kpfG3
12В на Outputs не должно быть никогда, даже случайно!
Я делал вот так: Плата разводки питания
А плата по вашей ссылке не для питания моторов. Ток 1.5А максимум для подвеса.
Но на самом квадрике есть уже плата разводки, т.е. нижняя часть квадрика и есть плата разводки. Как правильней запитать моторы и ESC, подскажите пожалуйста!?
Заранее благодарю.
Есть вот такие Бэки:
1) http://goo.gl/I0OpXs Есть уже в наличии
2) http://goo.gl/FHmSbu Скоро приедут ко мне
3) http://goo.gl/3XvAVj Тоже скоро приедет, но для других нужд 🙂 а может и его можно использовать?))
Получается что я к батарее могу подключить на данный момент только ПМ, а вот для моторов питание не могу, потому как ПМ напрямую от батареи. Так можно же сделать разветвление от батареи на ПМ и на PCB плату квадрика или!?
А как вам такое решение http://ali.pub/sl5j0
Может можно будет допилить эту платку, добавить конденсаторы и т.д.?
Питание с батарей подаете на нижнюю часть рамы, оттуда берете питание на моторы (3S или 4S или какое у вас там напряжение), там еще должен быть пятачок с контактами, чтобы подключить к нему вход BEC’а, с которого получите 5В для авионики.
Ну да, спасибо. Извините за дурацкие вопросы просто еще новичок, сразу не доходит 🙂
Я по другому просто сделал, может это с одной стороны не логично. Сделал я так, вместо того что бы припаять контроллеры скорости на прямую к нижней части PCB платы, я припаял банана коннекторы и теперь можно с легкостью поменять контроллер если вдруг это необходимо. Не знаю можно ли так делать 🙂 Да, и теперь у меня нет этого пятачка с контактами куда можно было бы припаять что либо.
Вот так вот я реализовал подключение контроллеров 🙂
[URL=http://radikal.ru/fp/be1c7a8d799945f0b202bfb115f8ad09][IMG]http://i011.radikal.ru/1512/00/5a644baed5cft.jpg[/IMG][/URL]
Скажите, подойдут ли ферритовые колечки желтого цвета с внутренним диаметром 7мм или нужно поболее? Смотрю видео Юлиана и там как я полагаю он использует такие же колечки, около 7мм или я ошибаюсь.
Желтыми колечками могут быть и не ферритовые. Это может быть порошковый металл.
Если колечки из блоков питания или материанских плат ПК — это металл. Тут эффект может быть обратный. Лучше найти любой маркированный феррит.
Вот такие вот подойдут?
http://ali.pub/p6brx
Самые дешевые которые нашел на Али, почему они такие дорогие 🙁
Видимо продавец ошибся и вместо «lot» (50 штук, судя по описанию), написал «piece». В таком случае почему бы не спросить у продавца дополнительную информацию перед покупкой? А так цена 230р за 50 штук — очень даже дешево. У нас в розничных магазинах за феррит (повторюсь — феррит, а не металл) такого размера просят рублей 20, а то и полная случайность в цене.
Во первых всех с Новым Годом! Желаю всем здоровья и это главное, остальное все в ваших силах. А вот во вторых этот продавец продает именно 50шт. (я спрашивал), обычно так продавцы пишут именно в самом сабже, так что вот так)))
И еще раз всех с Новым годом. Покаааааа, до новых встреч в новом году)
Объясните пожалуйста, как понять маркированный феррит. Я просто еще не разбираюсь во всем этом, извините за тупые вопросы 🙂
Нашел вот такие, но думаю ссылки сюда нельзя кидать как я понял. Вот что написано на странице продавца:
Iron powder core is generally stored near signals of place.
It has isolation eddy current, low permeability and constant magnetic characteristics.
Used widely in power transformers, current transducers, instrument transformers, inductors, chokes, ballasts, voltage stabilizers and regulators, welding transformers, broad band transformers, filters, etc.
Ну нормальные (нормальными я называю советские) ферриты имеют обычно маркировку. Нам надо отсечь ВЧ помеху, поэтому надо именно феррит, а не металлический порошок. Об этом можно почитать на радиолюбительских форумах.
Ссылки давать в комментариях можно, а сокращенные ссылки, сделанные какими-либо сервисами не желательно!
PS: Иногда надо обновить страницу, чтобы увидеть свой крайний комментарий.
Подскажите пожалуйста,только начинаю собирать квадрокоптер. Мне пришёл power module на выходе у него 4.6в а не 5.3в запитывал от разных акуммуляторов.Можно ли использовать такой рм для питания апм.
4.6В — очень мало. ATmega2560 может работать от минимального напряжения 4.5В, но есть же и другое оборудование еще. Источник питания должен быть 5В, способный отдать 1А. Можете разглядеть ваш повермодуль. Может есть либо подстроечный резистор, либо можно поменять какой другой. Смотрите datasheet на микросхему.
Спасибо.Ну тогда этот модуль можно использовать как сигнальный, сняв с него 5в. А вот в обзоре у Юлиана питание по феншую какой он впайвает конденсатор ?
На выходе электролит? 470-1500мкФ.
Здравствуйте, подскажите пожалуйста, какой R1 нужно для батарей 5s и 6s?
Таблица в конце статьи. 11 и 15 кОм соответственно.
Спасибо. Как то не заметил
А можно заменить стабилизатор LM2940IMP-5.0 на LM2940CT-5.0
Почитайте даташит. http://www.ti.com/lit/ds/symlink/lm2940c.pdf
Похоже он устаревший и разработчик не рекомендует к использованию во вновь разрабатываемых устройствах. Так же разница в рабочей температуре. Есть и еще различия, в которые нужно вникать.
Спасибо будем ставить LM2940IMP-5.0, просто LM2940CT-5.0 есть в наличии.
Здравствуйте.подскажите пожалуйста.Подключил регуляторы без бека.Подключил Power Module.Горит зелёный индикатор.Красный и синий мигают поочередно.Армится не хочет.До этого регуляторы стояли с беком, но без PM и все армилось, запускалось и т.д.
А что говорит Mission Planner? Либо в prearm check, либо в messages что-то должно быть.
Ничего не говорит.Подключаю к компу, он армится, пишет ARMED.но на деле моторы не крутятся
Банально а заново калибровку по газу проводили? От 3 канала приемника нормально стартуют?
Не знаю писали уже или нет, сил не хватает все прочитать, но что б не наступать на шоабли, нужно знать следующее — 6.5 в на 2596 не хватает и из-за этого просаживается общий выход. Я на холостую выставил 6.5в, выход получил 5в. Думал очень хорошо. Подключил апм 2.6, гпс с компасом 7М и телеметрию — итог 4.35 на выходе. Узнал я об этом только на третий день попыток первый раз взлететь. В итоге сделал следующее — подключил все что будет подключено и лм2596 с 4.35 подстроечником довел до 5в. Все сразу заработало как надо.
Конкретно какая у вас плата не знаю, но значит в этом случае не справляется дроссель, раз так напряжение просаживается при повышении тока. И не плохо еще на выходе импульсного регулятора поставить линейный с низким падением напряжения.
На выходе стоит линейный 7805 с кондером электролитом на 100мкф
Как сильно он греется? А вообще странная просадка, ведь комплектующие идентичны. Но главное решение то нашлось.
Добрый день! Все понятно по схеме, но я только начинающий, подскажите кто в теме маркировку конденсаторов C5,C6,C7,C8. В нашем магазине радиодеталей не могут мне найти, предлагают обычные круглые. Спасибо.
Подскажите маркеровку конденсаторов С5,С6,С7,С8. СПАСИБО
Маркировка у них в зависимости от даты производства, номера партии и т.д. Т.е. ничего не даст. Номиналы есть и этого должно быть достаточно. Электролиты танталовые — именно это и надо сказать в магазине. Но обычно такое не в каждом магазине продается. На помощь могут прийти платы от старых жестких дисков.
Здравствуйте. У меня вопрос. Можно ли на стабилизатор LM2596 подпаять L7805 вместо LM7805? Если такой вопрос уже был прошу извинить, а то столько уже перечитал, что мог упустить из виду.
Заранее спасибо.
Юлиан в своем видео говорил что подойдет любая из них.
Добрый день форумчане, я тут новенький и этой мой первый пост, а что вы думаете про этот феншуй https://ru.aliexpress.com/item/5V-6V-HOBBYWING-RC-UBEC-3A-Max-5A-Lowest-RF-Noise-BEC-Full-Shielding-Antijamming-Switching/32582741625.html?spm=2114.13010308.0.0.X0D8mr&detailNewVersion=&categoryId=200001407
кто-нибуть юзал данный девайс.
Вроде про него речь идет тут:
Жаль, что уже ссылка мертвая у китайцев, но вроде там была как раз такая картинка.
Прошли годы… У китайцев не появилось ничего готовенького?
Описана опастность подключения от регулятора — он может перегрузиться от лишней работы… А если взять отдельный регулятор исключительно ради питания апм? Второй костыль — а если апм запитать вообще автономно от двигателей — свой аккум поставить? сколько она кушает?
Подобные девайсы обсуждаем тут.
Ну так в статье и рассматривается, что по сути используем отдельный регулятор. Можно питать и от отдельного аккумулятора, то как-то тоже надо обеспечить стабильные ровные 5В. Получается все то же самое.
Плата потребляет около 100-150мА.
Понял, спасибо. Про автономное питание я почему — коптер падает не из-за того, что движок прокрутить не может, а питание на мозги становиться не феншуйное, так? Тогда по логике запитав мозги отдельно, сможем аварийно посадить при переразряде?
Самое опасное — возможность зависания контроллера, но на практике это бывает очень редко. Если обеспечено стабильное питание 5В (не ниже 4.9), то и случиться ничего не должно.
Приветствую. МП обновился. Как теперь подключить этот модуль к АПМ?
Здравствуйте.
Потихоньку собираю свой 450 квадрик
Практически везде советуют избавляться от power module. Неужели он так плох ?
Если скажем квадрик планируется для спокойных полетов, его будет достаточно ?
На бангуде сейчас имеется два варианта
http://www.banggood.com/APM-Power-Module-with-5_3V-DC-BEC-Available-with-T-or-XT60-p-1035032.html
и почти в два раза дороже
http://www.banggood.com/APM-2_6-2_5-2_52-Power-Module-With-5_3V-DC-BEC-p-925901.html
интересно, почему такое отличие в цене.
Я думаю из за напряжения которое может пропустить power module в первом более дешевом 30V, а во втором 50V.
да вот кстати я поставил себе тот что дешевле,ток не замерял пока т.к нет прибора, но МП показывает скачущие цифры в рамках от 4.7 до 4.9V
Всем доброго дня, питаю свой аппарат от PM GM0.1 () По факту это импульсный блок питания на MP1583. В логах достаточно сильные пульсации, в районе 0.38В. Установил на APM (у меня APM2.8), фильтрующий конденсатор 470мкФ/16В, но сильных перемен не увидел. Думаю может быть керамический конденсатор прямо на модуль впаять в районе 0.1мкФ?
Вообщем буду благодарен за дельный совет по решению данной проблемы.
всем привет. помогите мне с регулями один из восьми движков срабатывает при 60%газа,что можно сделать
Менять местами моторы/регуляторы для выяснения проблемного места. Либо повреждение обмотки/подходящего провода, либо выгорание транзисторов.
Использую такой импульсный модуль https://ru.aliexpress.com/item/Low-Ripple-DC-DC-Converte-DC-4V-to-40V-LM2596-Adjustable-Step-Down-Power-Supply-Module/545477313.html?spm=a2g0s.9042311.0.0.i9W4OT , на шумы не проверял, в работе проблем не возникало
квадрокоптер сам меняет частоту оборотов моторов в полноте после несколько секунд или иногда минут полнотa, какая может быть проблема ? так случается после падения, раньше летал нормально, перенастроил все, не помогает, APM 2.8, FS-iA6b, Аппаратура управления Flysky FS-i6S, когда это случается он перестает отвечать на все команды aппаратуры управления, как будто он живой, начинает жить своей жизнью, пожалуйста помогите дроны уже атакуют
Правильное питание полетного контроллера APM (LM2596 DC-DC + L7805CV + ArduPilot Mega) | Вкусные рецепты
Видео. По мне спорно, но пусть будет для информации.
Юлианом предложен более простой способ запитки контроллера. Плюсом является быстрота изготовления, а из минусов, по моему мнению, то, что нет делителя для датчика напряжения и выглядит не так изящно. Думаю Юлиан не обидится на меня.
1. Запитал APM 2.8 через стабилизатор на LM2596+7805 выводы A1 +5 и —
Телеметрии нет, можно ли подключить через USB для настройки?
2. Есть Power Module хочу использовать как сенсор I и V. Достаточно ли будет — от PM подключить к A1 — в APM; VOL с PM в A1 S APM; CUR от PM в A2 S APM?
Спасибо!
Эта схема не совсем корректная http://apmcopter.ru/wp-content/uploads/2014/04/apm-power-circuit.png
дело в том, что аналоговых входов всего 12, а 13ый и 14ый ряды это разъем программирования «ISP»
Не помешало бы схему перерисовать..
Если делать, то «по красоте»
К чему я это…
Я уже неоднократно тыкаю в этот разъем в надежде взять там «общий» а от вовсе не там…
И тычу в +5V..
И каждый раз ищу этот прикол, пока не вспомню.
А знаете в чем дело? Дело в схеме с этого сайта — она плотно засела у меня в памяти..
На этот раз «поипавшись» решил найти где я эту схему видел…
Покопавшись в закормах своей никчемной памяти вспомнил, что тут…
Перерисуйте, будьте любезны 🙂
С уважением «UWRTEY»
Поправил картинку. Спасибо.
Плохо поправил.
Все равно не верно.
Тут посмотри как должно быть: https://forum.apmcopter.ru/threads/pitanie-apm-osnovnaja-tema.845/page-3#post-39732
С уважением UWRTEY…
Заменил. Спасибо.