
На данный момент мы выполнили все основные шаги по сборке и настройке всех комплектующих коптера. Осталось потерпеть еще немного, и можно делать ваш первый полет!
Напомню, что для того, чтобы лучше осмыслить материал, сначала статью необходимо прочитать полностью, а уже потом делать действия, о которых рассказано в статье.
Рекомендую всегда летать на открытой площадке вдалеке от людей и строений, деревьев и воды, тем более это касается вашего первого полета! Все это необходимо для обеспечения техники безопасности. Безопасно будет людям и вашему коптеру. Лучше всего найти в вашей округе поле, где можно удобно расположиться. На первый полет лучше взять ассистента, которого надо проинструктировать, чтобы в первую очередь не мешался и не лез под винты, а во вторую очередь он будет подсказывать вам, что необходимо сделать и проверить при подготовке к полету (соответственно сначала рассказать ему о всех ваших действиях). Много о предполетной подготовке рассказывать не буду (об этом можно почитать на сайте Алексея Козина).
Еще раз вспомним, что мы уже сделали: настроили аппаратуру радиоуправления, выбрали тип рамы, откалибровали акселерометр, настроили и откалибровали компас, настроили полетные режимы и FailSafe.
Рекомендую потратить еще полчаса и обобщить весь материал по сборке и настройке. В этом нам поможет видеоматериал от Юлиана. Смотрим!
Как только все это выполнено — идем в поле, взяв с собой коптер, аппаратуру РУ, аккумуляторы, ноутбук, телефон или модем с интернетом (для загрузки карты), модуль телеметрии. Можно взять инструменты и запчасти, но будем надеяться, что ничего не сломаем. Еще раз в поле нам необходимо сделать калибровку компаса. Это необходимо для того, чтобы данные калибровки были наиболее «чистыми», т.е. подальше от металла. Также необходимо сделать compassmot.
Далее начинаем подключение оборудования.
1. Подключаем модуль телеметрии к ноутбуку и запускаем Mission Planner.
2. Подключаем вольтметр с пищалкой (раньше об этом не говорил, но эту штуку считаю обязательной на борту!) к балансировочному разъему аккумулятора, подключаем аккумулятор к коптеру.
3. Дожидаемся инициализации платы и подключаемся к контроллеру на ноутбуке в Mission Planner.
После загрузки параметров еще раз смотрим на показания горизонта при повороте коптера. Смотрим остальные показания, запоминаем где и что находится.
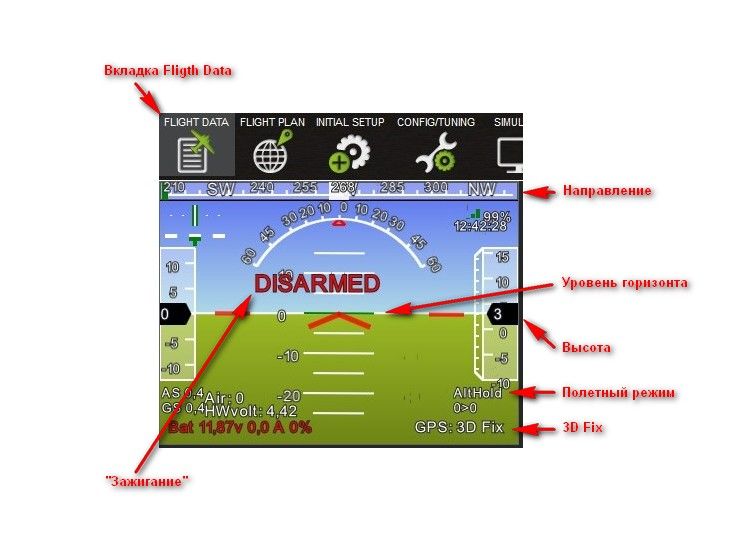
Полетные данные
Полетные данные
Важно еще раз провести калибровку компаса в реальных условиях. Это надо сделать именно в вашем летном месте, т.е. на улице при удалении от металлических предметов. Крайняя калибровка дома может стать причиной краша!
Подключаем ноутбук к сети Интернет (используя телефон или модем) для того, чтобы Missiom Planner (далее MP) скачал карту (позже расскажу, как дома заранее скачать нужный кусок карты). Пока что MP не знает, где находится ваш коптер. Для того, чтобы ваша координата отобразилась, необходимо выполнить процедуру ARMING («зажигание», делается удержанием стика газа/рыскания вниз вправо на 3 секунды). Нельзя передерживать, т.к. при удержании 15 секунд коптер переходит в режим AutoTrim (автоматическая калибровка акселерометра в полете — об этом расскажу потом). Первый раз после подключения очередного аккумулятора процедура арминга происходит с задержкой, т.е. после того, как подержали стик, необходимо подождать еще секунд 5, пока проморгаются синий/красный светодиоды на плате, после чего подождать еще около 3 секунд и плавно поднимать стик газа для начала вращения моторов (в этот момент калибруется часть датчиков, а при последующем арминге без передергивания аккумулятора — датчики не калибруются и арминг происходит быстро). Первый раз это (ARMING) лучше делать со снятыми пропеллерами. В крайних версиях прошивок моторы начинают вращаться на малой скорости. Кому-то это удобно, кому-то нет. За это отвечает параметр «MOT_SPIN_ARMED». Если вам не надо, чтобы моторы вращались, установите значение параметра в 0. Как только вы сделали ARMING, на карте вы увидите точку вашего коптера и пойдет загрузка карты, отображаемой в области экрана. В окне навигации вы увидите слово ARMED, которое показывает на то, что «зажигание» включено. Дальше делаем процедуру DISARM (стик газа/рыскания вниз влево).
Ассистент в этот момент запоминает, что вы делаете и, по необходимости, в следующий раз говорит вам что делать.
Устанавливаем пропеллеры, ставим коптер на ровную площадку задом к себе (в этом положении управление будет полностью соответствовать положению коптера), отходим на 5 метров. Ассистент должен стоять сзади вас (это касается в будущем всех людей, кто будет находиться вблизи вас)! Всегда думаем о том, что техника безопасности важнее всего! Лучше потерять деньги (коптер), чем здоровье (© Александр Антонов)! При первом взлете нам неизвестно, как поведет себя коптер. Готовимся к худшему: набор высоты может быть быстрым, при резком отпускании газа возможна полная остановка моторов и падение коптера, реакция на стики крена и тангажа может быть тоже очень быстрая. Чтобы обезопасить коптер от падения и себя от возможных травм — все будем делать без резких движений.
Перед включением зажигания важно проверить наличие 3D Fix («подключились» спутники). 3D Fix можно видеть на полетном экране (изображение выше), а количество спутников смотрим в нижней части окна MP. Количество спутников должно быть не меньше 8, HDOP не хуже 2 (т.е. меньше 2). Если эти условия не соблюдены, то ждем. После каждой подачи питания на коптер (особенно касается первого полета за день), рекомендую всегда ждать 5 минут, чтобы данные со спутников были точнее. Посмотреть количество спутников вам поможет ассистент, чтобы вам не отвлекаться на дополнительные действия (старайтесь определить задачи, которые вам будет помогать делать ассистент).
На аппаратуре РУ у вас должен быть установлен режим «Stabilize» (ARMING также можно делать в режимах Acro, AltHold и Loiter, но пока этого делать не надо).
После того, как видим минимум 8 спутников, можно делать ARMING! Запомните это!
Еще раз повторюсь, что при установке нового аккумулятора первый ARMING делается дольше, чем последующие. После того, как контроллер закончил процедуры загрузки, на плате должны постоянно гореть синий светодиод (3D Fix) и красный (ARMING). Убедитесь в этом и сделайте DISARM. Делаем потому, что мы же должны еще были подойти к коптеру, и что на контроллере имеется «защита от дурака», которая по прошествии 15 секунд выполняет DISARM. Красный светодиод начнет мигать.
Настала пора взлетать!
Опять отходим от коптера на 5 метров и делаем ARMING. Далее начинаем плавно поднимать стик газа — моторы начнут врашаться. Смотрим, чтобы вращение началось без задержек и была примерно одинаковая скорость. Будем считать, что коптер у нас висит при 50% газа, поэтому плавно набираем обороты до 40% стика газа и потом делаем небольшой рывок до 55-60, чтобы взлететь и возвращаем до 50%. Этим небольшим рывком мы делаем отрыв от земли, чтобы ноги коптера «оторвались» одновременно и ничего не зацепили. Поднимаем коптер плавно на высоту 2х метров и пробуем немного поуправлять стиком крена/тангажа. В этот момент работает стабилизация коптера по горизонту. Если калибровка акселерометра была точной, то при отсутствии ветра коптер должен висеть достаточно хорошо. Если немного тащит в сторону, то калибровку необходимо повторить. Чтобы посадить коптер на землю, начинаем плавно снижать уровень газа. Резко бросать нельзя, т.к. моторы остановятся мгновенно! После посадки делаем DISARM.
Поздравляю с первым полетом!
Дальше можно приступить к следующему полету. Рекомендую полетать до конца дня в режиме Stabilize, чтобы начать привыкать к этому основному режиму. Дальше можно пробовать режимы AltHold и Loiter. Перед включением режима Althold будьте готовы, что коптер может начать терять высоту или наоборот ее набирать, поэтому надо взлететь повыше перед включением. Если высота держится плохо, то необходимо перейти в режим Stabilize (ручное управление) и посадить аппарат. Если поведение не устроило, то надо искать причину неправильной работы бародатчика (возможно что-то сделали не так, тогда читаем статью «Поролон для бародатчика»). Если все хорошо, то можно полетать в этом режиме, чтобы запомнить поведение. Дальше можно проверить работу режима Loiter. Перед включением также будьте готовы к плохому удержанию точки. Запоминайте поведение (тащит в сторону, начинает делать круговые движения), чтобы в дальнейшем искать проблему. Проблема может быть в плохой калибровке компаса или влиянии силовых проводов на компас.
Еще раз поздравляю вас с первыми полетами! Если все в порядке, то можете летать и повышать мастерство 🙂 !!! Мне в свое время помогли уроки с этих сайтов: раз, два. Если что пошло не так, то читаем статьи и устраняем проблемы!
Удачных полетов!
Чтобы полет был всегда крайним, а не последним!
Update 06.08.2015: Добавлено подробное описание процесса первого арминга.
Если вы нашли ошибку на странице, то нажмите Shift + Enter или нажмите здесь, чтобы уведомить нас.





Все проделал,но арминга нет(стиком вниз в право),что еще мог забыть?
Если вообще ничего не происходит, то поиграться с настройками аппаратуры (надо получить сигнал в идеале от 1100 до 1900). Надо убрать все тримеры и проверить, чтобы центры стиков выдавали сигнал 1500, а настройкой расходов добиться нужных границ.
Если при арминге пишет «Prearm Check», то проверять калибровки и настройки сенсоров.
Значения сигналов примерно такие (999-1900),включить зажигание удалось соседним стиком (не газовым) в том же положении (вниз в право) на 5 сек,как эту активацию перенести на газовый стик (левый на пульте). Прошивка 3,1,5.
Похоже у вас на аппаратуре Mode1 или вы ошиблись в подключении каналов. Если Mode2, то слева должен быть газ и рыскание, справа крен и тангаж. Как изменить режим читайте инструкцию по аппаратуре. Еслил Турнига, то надо разобрать и переставить фиксатор стика справа налево и прошивку поставить er9x. Дальше домыслите.
Аэрофотосъемка имеет не полную детализацию по местности. Возможно ли поменять сервер загрузки карт,например на яндексовский?или могут быть несоответствия с расширением и координатной сеткой?
В MP справа можно выбрать загружаемую карту. насчет других приложений не знаю.
Насчет арминга,у меня мод2 и прошивка er9x,гистограммы сигналов в мишен планере отрабатывают как положено,но активация всеравно происходит правым стиком.
Покажите (лучше на видео), как двигаются бегунки в планере в зависимости от стиков.
Моторы с каким KV посоветуете под массу коптера в районе 2-2,5 кг? Или где почитать про правильный выбор моторов и пропов в зависимости от размеров рамы и массы.
Лучше воспользоваться калькуляторами.
http://rc-calc.com/ru/copter
http://www.ecalc.ch/xcoptercalc.php?ecalc&lang=ru
Собрал,настроил (благодаря Вашему форуму),ЛЕТИТ!!! висит как Naza!
Но GPS,в режиме loiter сразу тянет в сторону (компас с GPS ublox6h в 10см на штативе от проводов),вид.передатчик выключен,модем в 15 см от компаса/gps.Что можно еще сделать?
Не форум, а сайт 🙂
Compassmot делали? Сколько % показывает?
Как тянет? С ускорением по окружности с увеличением радиуса или по окружности с небольшим радиусом?
Влад, что было с РУ? Разобрались, из-за чего Arming не удавалось сделать?
У меня такая же ситуация. В режиме стабилизации летаю нормально но если переключиться в Loiter коптер сразу право руля и попёр. Не подскажите как это лечить? Может компас перекалибровать ?
Калибровали давно? Ну если постоянно коптер находится примерно в одинаковых местах, если набрана статистика безглючности, то компас то и не надо калибровать. Если места меняются, особенно. Если коптер бывает с кучей металла, то можно и попробовать калибровать.
1)GPS/compass — я перехватывал управление,т.к. был ограничен в пространстве,уходит от точки целеустремленно на 5 метров,в произвольном направлении,закручивания (унитазинга) не наблюдал.Попробую компас мот.В MP (на карте) координата сильно не плывет,если коптер удерживать в ручном режиме.
2)Аппа FlySky (er9x) подключение не один к одному,какие то каналы пришлось менять местами и реверсировать тангаж. Если выключить пуль,срабатывет FS,но если включить пуль,на какое то время (2-3 сек) по каналу газа уровень сигнала достигает 50% и возвращается до установленной стиком отметкой?!
3)Как сократить время арминга до 2-3 сек?
4)Ближе к вечеру на 2 минуте было 2-4 нервных тика) как бы произвольные рывки,мож пульт-приемник…
5)Если MP не имеет доступа в инет,то через 3-10 мин. он аварийно вываливается на системе win8.на других не пробовал.
1) Делайте компасмот.
2) Если пришлось менять каналы, то в настройках аппы надо поиграться с настройками очередности каналов (RTEA вроде бы надо).
3) При первом арминге после передергивания аккумулятора арминг происходит долго из-за инициализации. Тольно не знаю, что он в этот момент делает. Дальше должно быть 2-3 секунды.
4) Где и что именно?
5) У меня Win 8.1 x64, проблем не наблюдал.
4)Стики в центре,замерял время висения,рывки похожи если бы стики кратковременно в право дернуть на доли секунды.
Это может быть из-за компаса/gps. Ну или аппаратура плывет сильно.
1)Сделал compassmot, значения колебляться 5-6%? Попробовать перезалить настройки в GPS? Я так понимаю если не поможет,то покупать GPS с SAW фильтром.
…датчик тока и напряжения показывают верные значения,из-за того что я использую неоригинальный бек с этими датчиками,могут быть значения компассмота неверными?
…после подтверждения команды compassmot моторы не пикали,но запускались по газу без арминга соответсственно
…дал газ до 80%,показания компассмота составили 10%.
Влад, прошу не спамить, особенно каждые 3 минуты (понимаю, что нет кнопки «Редактировать»).
А конфиг в GPS был залит с офф сайта? Попробуйте старый (с подробностями изменений не разбирался) от 17.09.2013. https://yadi.sk/d/-Lp1s0XgUn6dT
Вряд ли не оригинальный бек влияет в данном случае (конечно надо, чтобы провода были подальше от компаса). Моторы не пикали — это нормально. Показания compassmot очень хорошие. Результат дало?
Откапал FTDI адаптер (ранее конфиг в GPS заливал через АПМ),в ublox центре (после заливки конфига заново),на карте точка более устойчива и точнее. Буду пробовать на аппарате…
С FTDI это уж точно не связано.
Спасибо за сайт, очень много полезной информации.
Я столкнулся с такой проблемой:
все настроил, откалибровал. Вроде все сделал как рекомендуют.
Решил осуществить первый полет. Заармил, стик газа прибавляю, коптер поднимается см на 40 и начинает жутко качаться (колбасит прям)причем раскачка с каждой секундой увеличивается. В итоге краш, сломал два винта.
В чем может быть проблема?
ЗЫ: контроллер апм 2.6, компас выносной на gps, сам gps вынесен на 20 см от силовых кабелей.
Взлетали в Стабильном? Версия прошивки, версия Mission Planner? Настройку делали мастером? Возможно сбит тип рамы. Например у вас X, а установился +. В первую очередь проверьте это.
Да, взлет проходил в стабильном режиме.
Прошивка стоит 3.1.5
МП 1.3.5
Настройку делал не мастером, по пунктам в МП.
Насчет типа рамы, это я не учел. Приду домой проверю.
Действительно, почему то слетел тип рамы с х на +.
Подскажите, какие моторы и пропеллеры использованы на коптере, что в видео.
Благодаря сайту, все сделал) Арминг долго(сутки) не мог сделать разобрался, газ был вверх ногами. Все откалибровано, рама f450, контроллер APM 2.6, винты стоят правильно 10″
начинаю взлетать, вперед сильно кренится… есть мысли?
Отлично!
На первых порах попробуйте откалибровать акселерометр как можно точнее. Поможет строительный уровень. Еще раз проверьте реакцию коптера на отклонения (БЕЗ ПРОПЕЛЛЕРОВ). При наклоне, например, переднего правого луча, передний правый мотор должен начать вращаться быстрее, и так со всеми. Этим мы проверяем правильно л подключены каналы моторов.
Если пытаетесь взлететь плавно, то одна из ног еще на земле. Именно она влияет. Надо попытаться взлететь более резко, чтобы коптер сразу оторвался на метр от земли. Без опыта это трудновато, но надо попробовать. Советую выйти в поле и найти сухостой, чтобы в траву мягко упасть в случае чего.
Взлетаем и смотрим что происходит. Если коптер сразу кувыркнулся или пошел расколбас, то скорее всего проблема в неправильном подключении. Если коптер держится и его немного тащит в сторону, то еще раз откалибровать акселерометр и потом сделать процедуру «Auto Trim» (не путать с «Auto Tune»), чтобы уровень горизонта коптер откалибровал сам.
В общем, такая штука, я взлетаю коптер быстро летит вперед, правый стик вниз полностью и останавливается, стоит на месте! отпускаю посередине мчит вперед…
Может гдето реверс стоит?
Проверить, чтобы в настройках пульта была выбрана модель «Самолет», удалить все миксы, заново откалибровать аппаратуру в MP.
Пытаюсь настроить аппарат для первого полета. Плата 2.6, МР 1.3.10.5. Прошивка 3.1.5.
Сделал калибровку стандартной процедурой через контроллер. В рамках процедуры обороты двигателя пропорционально увеличиваются от ручки газа.
При попытке «взлететь» а режиме стаб (без пропеллеров, без компаса и без GPS) при минимальном газе двигатели медленно вращаются (500-600 оборотов в мин), но стоит чуть поднять газ, обороты растут рывком на 5000-6000 ом/мин. Это нормально? Почему не плавно? На вкладке калибровки радио в МР — графика показывает «правильную» работу стиков.
Боюсь ставить пропеллеры — рванет в стратосферу Или это функция настраивается отдельно в МР? На других контроллерах — аиркам, сс3д — обороты соответствуют ручке
Приветствую! Пришлите, плз, логи с флеша. Посмотрим, что такое может быть.
По результатам непервого полёта у меня появился вопрос:
Если коптер нагрузить резкими манёврами, то иногда случается такое, что при возвращении его к режиму висения, коптер начинает колбасить, и он резко теряет высоту
Помню, у меня такое на игрушечном хубсане было, там это объясняли недостатком процессорной мощности
но здесь же вроде как контролллер уровнем повыше?
Или всё же 8 бит не тянут?
Играться с настройкой PID, просчитать ВМГ по допустимому весу, смотреть вибрации, попробовать сделать выкосы моторов.
ВМГ просчитывал перед постройкой, калькулятор обещал газ висения около 44, по факту 54
Но пропеллеры пока унылые (тем не менее, баланс у них нормальный и даже если менять местами коптер всё-равно крутит вокруг одного и того же луча)
вибрации смотреть никак не получается (равно как и газ висения выставить)
С этим связан следующий вопрос:
У меня внезапно совершенно появилось bad compass health
Я заметил, что если в последнее время делать калибковку гироскопа, то почему-то тут же отмирает компас
Раньше, если выскакивала такая ошибка, достаточно было сделать полный сброс
Теперь и это не срабатывает
В логах вчера писал: bad compass health
сейчас вобще: error init compass
И дальше идут нечитаемые кракозябры
Компас, при этом всём, в миишн планере работает
Вчера плюнул, отключил преарм проверку, и стал летать. Дроид Планнер предупреждал о неисправном компасе….а потом, после немягкой посадки предупреждение исчезло, и я смог летать с включённой проверкой арминга
сегодня вот только компас не откалибровать, и даже точки на картинке не выставляются…
Да, скажу сразу:
дорожки не резал,
поначалу всё прекрасно работало с внешним модулем 6M,
про то, что подключать АПМ без питания лучше с отключённым приёмником (и про переход всех датчиков на 5В из-за умирающего регулятора) прочитал постфактум, но ведь куча раз всё работало
Про полный сброс через среду ардуино видел, но как это сделать?
Про версию прошивки и планнера читал, но у меня последние — 3.2.(5?) и 1.3.17
Сброс не поможет. Разбирайтесь с железом и проверяйте сырые показания датчиков. Все должно меняться независимо друг от друга. Компас может требовать либо пропайку, либо замену.
В системе AHRS все связано и учитывается совместно.
дорожки не резал, потому что пришло комплектом — исходил из того, что китайцы всё до меня порезали
Откалибровал стики на пульте, в МР тоже, но почему то если дать правый стик вперёд по тангажу, то аппарат начинает тянуть в обратную сторону — назад. По крену всё нормально. Не пойму, почему так?
Артем, видимо невнимательно читали статью «Калибровка аппаратуры Turnigy 9x в Mission Planner». Обратите внимание на крайние пару абзацев! Необходимо сделать реверс канала.
Спасибо, Александр, как раз это и не учёл, теперь всё нормально.
Люди добрые! Не взирая на всем известный он-лайн калькулятор коптеров, а только основываясь на личный опыт, скажите пожалуйста, какими должны быть моторы и пропы на квадрокоптере с общей массой около 2,8 кг?
Определитесь, для начала. Почиму именно такая масса нужна. И далее. Первое какую полезную нагрузку должен нести ваш коптер? второе сколько времени должен летать? третье какой допустимый ветер для полётов должен быть. Исходя из этого ПРОЕКТИРУЕТСЯ коптер, А какая масса при этом получится, покажут расчёты. Инспайёр при своём весе чета около 4 кг таскает всего навсего нагрузку полезную 200гр.
Вадим, спасибо за отзыв! Вся полезная нагрузка уже подключена и всё вместе это 2,8 кг, летать конечно же хочется чем дольше, тем лучше, но если реально оценивать, то и 15 минут было бы уже неплохо. Аппарат планируется использовать при ветре 3-5 м/с. На счёт Инспайра — идея хорошая, поизучаю. А как вы рассчитывали свой коптер?
Расчитывал, и он достаточно точен по калькулятору http://www.ecalc.ch/indexcalc.htm. И сравнивая существующие готовые модели. В вашем вопросе нету ни одного входного параметра для расчёта. Вот я тебе скажу мой коптер имеет взлётный вес 6.5 кг. И я хочу чтобы он стал офигенным. Подскажи мне как это зделать. П.с. Он и так классный.
ну хорошо и на том спасибо))
Добрый вечер. При первом полёте коптер начал вращаться вокруг своей оси. Такое ощущение что один из двигателей работает сильнее чем остальные. Подскажите где копать. Автопилот HK pilot Mega 2.7. Крайняя прошивка на квадрокоптер. С уважением Сергей.
Проверить, чтобы на аппаратуре трим стоял в нулях и уровень сигнала в среднем положении стиков был в районе 1500. После чего сделать калибровку аппаратуры. Далее сделать калибровку регуляторов средствами APM.
Сделал как вы сказали. Всё равно крутится вокруг себя. Запускал без винтов и смотрел в программе. На разных положениях ручки газа сохраняется такая тенденция. Двигатель 1 держит больше всего оборотов, Двигатель 2 меньше всего оборотов, двигатели 3 и 4 примерно одинаковы по оборотам и расположены по середине. Пробовал менять двигатели с регуляторами местами, всё так же. Подскажите что менять в программе. С уважением Сергей.
Cмотрел показания с помощью вкладки Filesafe.
При перестановке регулятора на другой мотор тенденция сохраняется?
Возможно калибровки недостаточно и требуется настройка регуляторов. Либо сразу загрузить прошивку типа SimonK или BLHeli.
Приветствую! Помогите кто может! После неудачного запуска, квадр пытался просто улететь от меня, получилось жестокое падение с этажа наверное 9го, но ладно все поменял. Теперь проблемма, на апе газ 3 канал в АПМ 4, когда подключаешь фишки соответственно номерам все армится реагирует на газ, но в МП значения при калибровке радио показывает совершенно другие.Пытался поменять фишки, с 3 приемника в 4 АПМ, в МП калибруется все верно, но не армится, а в МП стики двигаются, как решить эту проблему? Пробовал сброс АПМ, через терминал, не знаю получилось или нет но все так и осталось, ПОМОГИТЕ лето заканчивается, а полетать хочется
У меня подобное было неделю назад то же собирал коптер, подключил 1-й канал полностью (+,- и сигнал) а остальные каналы подключил только сигнальные контакты ( одним коннектором сразу 3 канала) при этом каналы при калибровке в MP не соответствовали каналам аппаратуры. Я так и не понял в чем дело но после обновления MP и внимательного переподчинения: 1-й шнурок подключил на сигнальные контакты 1, 2 и 3-го каналов аппаратуры и APM. Второй шнурок подключил на сигнальные контакты 4, 5, и 6 каналов аппаратуры и APM. оставшиеся два канала 7 и 8 подключил двумя шнурками как надо, то есть «+» в «+», «-» в «-«, «~» в «~». И все встало на свои места.
И еще есть вероятность ,что у вас в Миксах аппаратуры выставлены не те значения каналов должно быть:
CH1 AIL
CH2 ELE
CH3 THR
CH4 RUD
Доброго времени суток.
Прежде всего, хочу поблагодарить за отличный сайт, спасибо!
Вопрос: калибровку компаса в поле без компьютера никак? В программах для андроида только калибровка акселерометра есть.
Да, по аналогии с Назой — компас на АРМ не калибруется. Никакой специальной комбинации для калибровки компаса нет. Так как процедура сильно «заточена» на компьютер (там ещё вычисляется магнитное склонение например).
Возможно, в будущем разработчики придут к этому, на данный момент такой возможности не имеется.
Можно использовать ноутбук, планшет или смарт.
Приветствую! А можно по подробней про планшет или смарт? Просто ни в DroidPlanner, ни в Tower калибровки компаса нет, а в Qgroundcontrol beta она не работает (прога виснет). Просто не удобно таскать с собой ноут, вот и озадачиваюсь.
На форуме есть соответствующая тема. Можете вопрос задать там. Но вроде как с калибровкой компаса ничего до сих пор нет с Android.
http://forum.apmcopter.ru/threads/gcs-dlja-android.493/
Да и зачем? Если конструкцию не переделываете и нет аномалий в вашей местности, то достаточно откалибровать всего 1 раз в поле и дальше спокойно летать.
Иногда перемещаюсь на 150-200 км к объекту и не всегда удобно таскать ещё и сумке с ноутом. Тем не менее спасибо за ответ.
У меня странная проблема на apm 2.6. Все армится и калибруется без проблем. Но вот даю газ и выдает только половину мощности. Не хватает даже на взлет. После того как стик доходит до середины и идет дальше вверх ничего не меняется и на верхней точке мощность как на середине. Если подключить напрямую к регулю без апм все работает отлично и газ выдает полный. Аппу откалибровал. Где смотреть?
1) Калибровать аппаратуру в MP.
2) Калибровать регуляторы от APM.
3) Сделать очистку EEPROM и настройки провести заново.
4) Если не помогло, то пробуем ранние прошивки APM и проверяем регуляторы с другими контроллерами. Бывает, что не все регуляторы нормально работают с APM.
Спасибо. Регули у меня DJI 30A opto. Говорят их калибровать не надо. Моторы тоже DJI 2212
Алексей, ваша проблема решилась? У меня такая же штука на ките dji e305, не раскручиваются движки почему-то.
Парни, вопрос остался открытым? Та же проблема.
здравствуйте. такая проблема: переберал коптер в связи с заменой аппы (на rlink) и установкой диодных лентвсе собрал пошел летать. полетал все ок, но что то глючил gps решил перепрошить его. сделал это через apm. все прошло хорошо. установил обратно прошивку на апм все настроил и тут началось. все настройки в норме пиды тоже, но когда армиш и даешь газ коптер начинает люто колбасить из стороны в сторону (даже если не взлетел) если взлететь колбасит еще сильнее и потом краш. перезалил прошивку перенастроил все опять попробовал дома в руке над головой держать и давать газ вроде все хорошо тянет в верх не колбасит. думаю ну завтра пойдк плетаю наконец. сегодня вышел на улицу включаю армлю и такая же ерунда с калбасней. вот теперь сижу и думаю что за ерунда. может регули накрылись? по идее в настройках apm все хорошо: компас калиброван аксель калиброван аппа тоже. пиды что надо. жпс ловит. рама Х. может было у кого. помогите чем сможете пожалуйста. а то начинаю разочаровываться в апм и копить на назу)))
Не пользоваться мастером настройки. В настройках еще раз тыкнуть конфигурацию рамы X.
Но похоже надо чистить EEPROM и после очередной настройки с нуля будет все ОК.
спасибо за ответ. ресет ту дефаулт и чистка EEPROM не одно и тоже?
По сути кнопка должна чистить EEPROM. На крайних версиях так, где нет терминала.
Добрый день!
Скажите кто сталкивался с такой проблеммой, в МП коптер гуляет по экрану, и при запуске при переключении в режим удержания по ЖПС хочет куда нибудь срулить. Где можно про это найти информацию?
GPS Fix при этом на экране было? Предлагаю найти соответствующую тему на форуме и выложить туда для начала фото вашего коптера в деталях.
Всем привет! Собрал коптер на апм 2.8 на 450 раме и движках readytosky 920 kv. Самый попсовый сет. Не могу в МП откалибровать компас. Делаю live calibration, вроде должен дать 60 секунд на вращение во всех плоскостях, но начинаю крутить и секунд через 15 уже он пищит и выдаёт значения офсетов. Офсеты так себе первое значение 5 второе 70 третье 152. Насколько я понял они должны быть чуть больше 0. Не смотря на это в режиме удержания по gps коптер висит как прикленный. Пиды 0.09 выставил. Хотя рекомендуют 0.102 для этой рамы. В режиме stab его немного качает но не особо. Так что с компасом?
Методика поиска проблем с компасом
Калибровка компаса APM
доброе время! после поворота по рысканью на 90 градусов на право коптер летит вперед подавая команду лететь на право и так с другими направлениями, назад-на право… в чем проблема?
заново перекалибруйте сначала саму аппаратуру, затем пройдите процедуру калибровки аппаратуры в Mission Planner